Projekčné body, ktorých zhoda sa nazýva. Lekcia kreslenia „konštrukcia projekcií bodov na povrchu objektu“
Ciele:
- Štúdium pravidiel pre konštrukciu projekcií bodov na povrchu objektu a čítanie výkresov.
- Rozvíjať priestorové myslenie, schopnosť analyzovať geometrický tvar objektu.
- Pestovať pracovitosť, schopnosť spolupracovať pri práci v skupine a záujem o predmet.
POČAS VYUČOVANIA
ETAPA I. MOTIVÁCIA VZDELÁVACÍCH ČINNOSTÍ.
ETAPA II. FORMOVANIE VEDOMOSTÍ, SCHOPNOSTÍ A ZRUČNOSTÍ.
ZDRAVIE ŠETRNÁ PAUZA. ODRAZ (NÁLADA)
ETAPA III. INDIVIDUÁLNA PRÁCA.
ETAPA I. MOTIVÁCIA VZDELÁVACÍCH ČINNOSTÍ
1) učiteľ: Skontrolujte svoje pracovisko, je všetko na svojom mieste? Sú všetci pripravení ísť?
Zhlboka sa nadýchnite, pri výdychu ZADRŽTE NÁDYCH, VYDÝCHNITE.
Určite svoju náladu na začiatku hodiny podľa schémy (táto schéma je na stole každého)
PRAJEM VÁM VEĽA ŠŤASTIA.
2)Učiteľ: Praktická práca na tému „ Projekcie vrcholov, hrán, plôch“ ukázali, že sú chlapi, ktorí pri premietaní robia chyby. Sú zmätení, ktorý z dvoch zhodných bodov na výkrese je viditeľný vrchol a ktorý je neviditeľný; keď je hrana rovnobežná s rovinou a keď je kolmá. Rovnako je to s okrajmi.
Aby ste predišli opakovaniu chýb, plňte potrebné úlohy pomocou poradenskej karty a opravujte chyby v praktickej práci (ručne). A pri práci si pamätajte:
"KAŽDÝ MÔŽE UROBIŤ CHYBU, LEN BLÁZENEC OSTANE S ICH CHYBOU."
A tí, ktorí si tému dobre osvojili, budú pracovať v skupinách s tvorivými úlohami (viď. Príloha 1 ).
ETAPA II. FORMOVANIE VEDOMOSTÍ, SCHOPNOSTÍ A ZRUČNOSTÍ
1)učiteľ: Vo výrobe je veľa dielov, ktoré sú k sebe pripevnené určitým spôsobom.
Napríklad:
Kryt pracovnej plochy je pripevnený k vertikálnym stĺpikom. Venujte pozornosť stolu, pri ktorom sa nachádzate, ako a čím sú k sebe pripevnené veko a stojany?
odpoveď: Bolt.
učiteľ:Čo je potrebné pre skrutku?
odpoveď: Diera.
učiteľ: Naozaj. A aby ste urobili dieru, musíte poznať jej umiestnenie na produkte. Pri výrobe stola nemôže stolár zakaždým kontaktovať zákazníka. Čo teda potrebujete zabezpečiť tesárovi?
odpoveď: Kresba.
učiteľ: Kreslenie!? Čo nazývame kresbou?
odpoveď: Kresba je obraz objektu pomocou pravouhlých projekcií vo vzťahu projekcie. Pomocou výkresu si môžete predstaviť geometrický tvar a dizajn produktu.
učiteľ: Dokončili sme pravouhlé projekcie, čo ďalej? Budeme vedieť určiť umiestnenie otvorov z jednej projekcie? Čo ešte potrebujeme vedieť? Čo sa naučiť?
odpoveď: Konštruovať body. Nájdite projekcie týchto bodov vo všetkých zobrazeniach.
učiteľ: Výborne! Toto je cieľ našej lekcie a témy: Konštrukcia projekcií bodov na povrch objektu. Napíšte si do zošita tému hodiny.
Vy aj ja vieme, že akýkoľvek bod alebo segment na obraze predmetu je priemetom vrcholu, hrany, tváre, t.j. každý pohľad je obrazom nie z jednej strany (pohľad z hlavy, zhora, zľava), ale z celého objektu.
Aby ste správne našli projekcie jednotlivých bodov ležiacich na plochách, musíte najskôr nájsť projekcie tejto plochy a potom pomocou spojovacích čiar nájsť projekcie bodov.
(Pozeráme si nákres na doske, pracujeme v zošite, kde sa doma vyrobia 3 projekcie tej istej časti).

– Otvoril poznámkový blok s hotovým výkresom (Vysvetlenie konštrukcie bodov na povrchu predmetu s vodiacimi otázkami na tabuli a žiaci si to zafixujú do svojich zošitov.)
učiteľ: Zvážte pointu IN. S ktorou rovinou je rovnobežná stena tohto bodu?
odpoveď: Okraj je rovnobežný s čelnou rovinou.
učiteľ: Definujeme priemet bodu b' na čelnej projekcii. Potiahnite prstom nadol od bodu b' vertikálna komunikačná línia k horizontálnej projekcii. Kde bude umiestnený horizontálny priemet bodu? IN?
odpoveď: V priesečníku s horizontálnym priemetom tváre, ktorá bola premietnutá do okraja. A nachádza sa v spodnej časti projekcie (pohľad).
učiteľ: Profilová projekcia bodu b'' , kde sa bude nachádzať? Ako ju nájdeme?
odpoveď: Na križovatke vodorovnej komunikačnej línie z b' so zvislým okrajom vpravo. Tento okraj je projekciou tváre s hrotom IN.
TÍ, KTORÍ CHCÚ KONŠTRUKOVAŤ NASLEDUJÚCI PROJEKT BODU, SÚ ZVANÍ DO RADY.
učiteľ: Bodové projekcie A sa nachádzajú aj pomocou komunikačných liniek. S ktorou rovinou je plocha s rovnobežným bodom? A?
odpoveď: Okraj je rovnobežný s rovinou profilu. Na projekcii profilu definujeme bod A'' .
učiteľ: V ktorej projekcii bola tvár premietnutá do okraja?
odpoveď: Vpredu a vodorovne. Nakreslíme vodorovnú spojovaciu čiaru, kým sa nepretína so zvislou hranou vľavo na čelnom priemete, dostaneme bod A' .
učiteľ: Ako nájsť priemet bodu A na horizontálnej projekcii? Predsa komunikačné linky z projekcie bodov A' A A'' nepretínajte priemet tváre (hranu) na horizontálnom priemete vľavo. Čo nám môže pomôcť?
odpoveď: Môžete použiť konštantnú priamku (určuje umiestnenie pohľadu vľavo) z A'' nakreslite vertikálnu komunikačnú čiaru, kým sa nepretína s konštantnou priamkou. Vodorovná spojovacia čiara sa nakreslí od priesečníka, kým sa nepretína so zvislou hranou vľavo. (Toto je tvár s bodom A) a označuje projekciu s bodom A .
2) učiteľ: Každý má na stole kartičku s úlohou s priloženým pauzovacím papierom. Preskúmajte výkres, teraz sa pokúste sami, bez prekresľovania projekcií, nájsť dané priemety bodov na výkrese.

– Nájdite obrázok v učebnici, strana 76. 93. Otestujte sa. Tí, ktorí to urobili správne – skóre „5“; jedna chyba – „4“; dve – „3“.
(známky si dávajú žiaci sami na hárku sebakontroly).
– Zbierajte karty na overenie.
3)Pracovať v skupinách:Časovo obmedzené: 4 min. + 2 min. kontroly. (Skombinujú sa dve lavice so študentmi a v rámci skupiny sa vyberie vedúci).
Každá skupina dostane úlohy v 3 úrovniach. Študenti si vyberajú úlohy podľa úrovne (ako chcú). Vyriešte problémy týkajúce sa konštrukcie bodov. Diskutujte o formácii pod dohľadom vedúceho. Potom sa správna odpoveď zobrazí na tabuli pomocou spätného projektora. Každý skontroluje, či je projekcia bodov vykonaná správne. S pomocou vedúceho skupiny sa udeľujú známky na zadaniach a na hárkoch sebakontroly (pozri. Dodatok 2 A Dodatok 3 ).
ZDRAVIE ŠETRNÁ PAUZA. REFLEXIA
"Pharaoh Póza"– sadnite si na okraj stoličky, vyrovnajte chrbát, pokrčte ruky v lakťoch, prekrížte nohy a položte ich na prsty. Nadýchnite sa, pri zadržaní dychu napnite všetky svaly tela, vydýchnite. Urobte to 2-3 krát. Pevne zatvorte oči, kým nedosiahnu hviezdy, a otvorte ich. Označte svoju náladu.
ETAPA III. PRAKTICKÁ ČASŤ. (individuálne zadania)
Na výber sú karty úloh na rôznych úrovniach. Študenti si vyberajú vlastnú možnosť podľa svojich schopností. Nájdite priemety bodov na povrch objektu. Práce sú odovzdané a ohodnotené na ďalšiu hodinu. (Cm. Dodatok 4 , Dodatok 5 , Dodatok 6 ).
IV ETAPA. FINÁLNY
1) Domáca úloha. (Pokyn). Vykonávané podľa úrovní:
B – pochopenie, na „3“. Cvičenie 1 Obr. 94a str.77 – podľa zadania v učebnici: doplňte chýbajúce priemetne bodov na týchto priemetoch.
B – žiadosť, na „4“. Cvičenie 1 Obr. 94 a, b. doplňte chýbajúce projekcie a označte vrcholy na vizuálnom obrázku v 94a a 94b.
A – analýza, „5“. (Zvýšená obtiažnosť.) Napr. 4 Obr.97 – zostrojte chýbajúce priemety bodov a označte ich písmenami. Neexistuje žiadny vizuálny obraz.
2)Reflexná analýza.
- Určte náladu na konci hodiny, označte ju ľubovoľným znakom na hárku sebaovládania.
- Čo nové ste sa dnes na hodine naučili?
- Aká forma práce je pre vás najefektívnejšia: skupinová, individuálna a chceli by ste, aby sa zopakovala aj na ďalšej hodine?
- Zbierajte hárky sebaovládania.
3)"Pomýlený učiteľ"
učiteľ: Naučili ste sa konštruovať projekcie vrcholov, hrán, plôch a bodov na povrchu objektu podľa všetkých pravidiel konštrukcie. Ale dali vám kresbu, ktorá obsahuje chyby. Teraz sa vyskúšajte ako učiteľ. Nájdite chyby sami, ak nájdete všetkých 8–6 chýb, skóre je „5“; 5–4 chyby – „4“, 3 chyby – „3“.

Odpovede:

Premietacie zariadenie
Premietacie zariadenie (obr. 1) obsahuje tri premietacie roviny:
π 1 – horizontálna projekčná rovina;
π 2 –čelná rovina projekcií;
π 3– rovina premietania profilu .
Projekčné roviny sú navzájom kolmé ( π 1^ π 2^ π 3) a ich priesečníky tvoria osi:
Priesečník rovín π 1 A π 2 tvoria os 0X (π 1∩ π 2 = 0X);
Priesečník rovín π 1 A π 3 tvoria os 0R (π 1∩ π 3 = 0R);
Priesečník rovín π 2 A π 3 tvoria os 0Z (π 2∩ π 3 = 0Z).
Priesečník osí (OX∩OY∩OZ=0) sa považuje za počiatočný bod (bod 0).
Keďže roviny a osi sú navzájom kolmé, takýto aparát je podobný karteziánskemu súradnicovému systému.
Projekčné roviny rozdeľujú celý priestor na osem oktantov (na obr. 1 sú označené rímskymi číslicami). Projekčné roviny sa považujú za nepriehľadné a divák je vždy vnútri ja- oktant.
Ortogonálne premietanie s projekčnými stredmi S 1, S 2 A S 3 pre horizontálne, čelné a profilové projekčné roviny.
A.
Z projekčných centier S 1, S 2 A S 3 vychádzajú premietajúce lúče l 1, l 2 A l 3 A
- A 1 A;
- A 2– čelný priemet bodu A;
- A 3– profilová projekcia bodu A.
Bod v priestore je charakterizovaný svojimi súradnicami A(x,y,z). Body A x, A y A A z respektíve na osiach 0X, 0R A 0Z zobraziť súradnice x, y A z bodov A. Na obr. 1 uvádza všetky potrebné označenia a ukazuje súvislosti medzi bodom A priestor, jeho projekcie a súradnice.
Bodový diagram
Ak chcete získať zápletku bodu A(obr. 2), v premietacom aparáte (obr. 1) rovinu π 1 A 1 0X π 2. Potom lietadlo π 3 s bodovou projekciou A 3, otočte proti smeru hodinových ručičiek okolo osi 0Z, kým nebude zarovnaný s rovinou π 2. Smer otáčania roviny π 2 A π 3 znázornené na obr. 1 šípok. Zároveň rovno A 1 A x A A 2 A x 0X kolmý A 1 A 2 a rovné čiary A 2 A x A A 3 A x budú umiestnené na spoločnej osi 0Z kolmý A 2 A 3. Ďalej budeme tieto riadky nazývať postupne vertikálne A horizontálne komunikačné linky.
Treba si uvedomiť, že pri prechode z premietacieho aparátu na schému premietaný objekt zmizne, ale všetky informácie o jeho tvare, geometrických rozmeroch a umiestnení v priestore sú zachované.
A(x A, y A, z Ax A, y A A zA v nasledujúcom poradí (obr. 2). Táto postupnosť sa nazýva metóda konštrukcie bodového diagramu.
1. Osy sú nakreslené ortogonálne OX, OY A OZ.
2. Na osi VÔL xA bodov A a získajte polohu bodu A x.
3. Cez bod A x kolmo na os VÔL
A x pozdĺž osi OY vykreslí sa číselná hodnota súradnice y A bodov A A 1 na diagrame.
A x pozdĺž osi OZ vykreslí sa číselná hodnota súradnice zA bodov A A 2 na diagrame.

6. Cez bod A 2 rovnobežne s osou VÔL je nakreslená horizontálna komunikačná línia. Priesečník tejto čiary a osi OZ udá polohu bodu A z.
7. Na vodorovnej komunikačnej línii z bodu A z pozdĺž osi OY vykreslí sa číselná hodnota súradnice y A bodov A a určí sa poloha profilového priemetu bodu A 3 na diagrame.
Charakteristika bodov
Všetky body v priestore sú rozdelené na body konkrétnych a všeobecných pozícií.
Body konkrétnej polohy. Body patriace k premietaciemu zariadeniu sa nazývajú body určitej polohy. Patria sem body patriace do projekčných rovín, osí, počiatkov a projekčných stredov. Charakteristické znaky jednotlivých bodov polohy sú:
Metamatematické - jedna, dve alebo všetky číselné hodnoty súradníc sa rovnajú nule a (alebo) nekonečnu;
Na diagrame sú dva alebo všetky projekcie bodu umiestnené na osiach a (alebo) umiestnené v nekonečne.
Body všeobecnej polohy. Body všeobecnej polohy zahŕňajú body, ktoré nepatria do premietacieho aparátu. Napríklad bodka A na obr. 1 a 2.
Vo všeobecnom prípade číselné hodnoty súradníc bodu charakterizujú jeho vzdialenosť od projekčnej roviny: súradnica X z lietadla π 3; koordinovať r z lietadla π 2; koordinovať z z lietadla π 1. Treba poznamenať, že znaky pre číselné hodnoty súradníc označujú smer, v ktorom sa bod pohybuje od projekčných rovín. V závislosti od kombinácie znakov pre číselné hodnoty súradníc bodu závisí od toho, v akom oktánovom čísle sa nachádza.
Metóda dvoch obrázkov
V praxi sa okrem metódy plnej projekcie používa metóda dvoch obrazov. Líši sa tým, že táto metóda eliminuje tretiu projekciu objektu. Na získanie premietacieho prístroja dvojsnímkovej metódy sa z plného premietacieho prístroja vylúči projekčná rovina profilu s jej stredom premietania (obr. 3). Navyše na osoh 0X je priradený referenčný bod (bod 0 ) a od nej kolmo na os 0X v projekčných rovinách π 1 A π 2ťahať osi 0R A 0Z resp.

V tomto zariadení je celý priestor rozdelený do štyroch kvadrantov. Na obr. 3 sú označené rímskymi číslicami.
Projekčné roviny sa považujú za nepriehľadné a divák je vždy vnútri ja-tý kvadrant.
Uvažujme o činnosti zariadenia na príklade premietania bodu A.
Z projekčných centier S 1 A S 2 vychádzajú premietajúce lúče l 1 A l 2. Tieto lúče prechádzajú cez bod A a pretínajúce sa s projekčnými rovinami tvoria jeho projekcie:
- A 1– horizontálne premietanie bodu A;
- A 2– čelný priemet bodu A.
Ak chcete získať zápletku bodu A(obr. 4), v premietacom aparáte (obr. 3) rovinu π 1 s výsledným priemetom bodu A 1 otáčať v smere hodinových ručičiek okolo osi 0X, kým nebude zarovnaný s rovinou π 2. Smer rotácie roviny π 1 znázornené na obr. 3 šípky. V tomto prípade na diagrame bodu získaného metódou dvoch obrázkov zostáva iba jeden vertikálne komunikačná linka A 1 A 2.

V praxi zakreslenie bodu A(x A, y A, z A) sa vykonáva podľa číselných hodnôt jeho súradníc x A, y A A zA v nasledujúcom poradí (obr. 4).
1. Os je nakreslená VÔL a priradí sa referenčný bod (bod 0 ).
2. Na osi VÔL vykreslí sa číselná hodnota súradnice xA bodov A a získajte polohu bodu A x.
3. Cez bod A x kolmo na os VÔL je nakreslená vertikálna komunikačná línia.
4. Na vertikálnej komunikačnej línii z bodu A x pozdĺž osi OY vykreslí sa číselná hodnota súradnice y A bodov A a určí sa poloha vodorovného priemetu bodu A 1 OY nie je nakreslený, ale predpokladá sa, že jeho kladné hodnoty sú umiestnené pod osou VÔL a záporné sú vyššie.
5. Na vertikálnej komunikačnej línii z bodu A x pozdĺž osi OZ vykreslí sa číselná hodnota súradnice zA bodov A a určí sa poloha čelného priemetu bodu A 2 na diagrame. Treba poznamenať, že v diagrame je os OZ nie je nakreslený, ale predpokladá sa, že jeho kladné hodnoty sú umiestnené nad osou VÔL a záporné sú nižšie.
Súťažné body
Body na rovnakom premietanom lúči sa nazývajú konkurenčné body. V smere vystupujúceho lúča majú pre ne spoločný priemet, t.j. ich projekcie sú rovnaké. Charakteristickým znakom konkurenčných bodov na diagrame je identická zhoda ich rovnomenných projekcií. Konkurencia spočíva vo viditeľnosti týchto projekcií vzhľadom na pozorovateľa. Inými slovami, v priestore pre pozorovateľa je jeden z bodov viditeľný, druhý nie. A teda na výkrese: jeden z priemetov konkurenčných bodov je viditeľný a priemet druhého bodu je neviditeľný.
Na modeli priestorovej projekcie (obr. 5) z dvoch konkurenčných bodov A A IN viditeľný bod A podľa dvoch vzájomne sa dopĺňajúcich charakteristík. Súdiac podľa reťaze S1 →A→B bodka A bližšie k pozorovateľovi ako k bodu IN. A teda ďalej od projekčnej roviny π 1(tie. zA > zA).

Ryža. 5 Obr.6
Ak je samotný bod viditeľný A, potom je viditeľná aj jej projekcia A 1. Vo vzťahu k projekcii, ktorá sa s ňou zhoduje B 1. Kvôli prehľadnosti a v prípade potreby na diagrame sú neviditeľné priemetne bodov zvyčajne uzavreté v zátvorkách.
Odstránime body na modeli A A IN. Ich zhodné projekcie na rovine zostanú π 1 a samostatné projekcie – zap π 2. Podmienečne nechajme čelnú projekciu pozorovateľa (⇩) umiestnenú v strede projekcie S 1. Potom pozdĺž reťazca obrázkov ⇩ → A 2 → B 2 to bude možné posúdiť zA > z B a že samotný bod je viditeľný A a jeho premietanie A 1.
Uvažujme podobne aj o konkurenčných bodoch S A D vzhľadom k rovine π 2. Keďže spoločný vyčnievajúci lúč týchto bodov l 2 rovnobežne s osou 0R, potom znak viditeľnosti súťažných bodov S A D určená nerovnosťou y C > y D. Preto ten bod D uzavreté bodkou S a podľa toho aj projekcia bodu D 2 bude pokrytá projekciou bodu C 2 na povrchu π 2.
Uvažujme, ako sa určuje viditeľnosť konkurenčných bodov v zložitom výkrese (obr. 6).
Súdiac podľa zhodných projekcií A 1≡V 1 samotné body A A IN sú na jednom vyčnievajúcom lúči rovnobežnom s osou 0Z. To znamená, že súradnice je možné porovnávať zA A z B tieto body. Na to používame rovinu čelnej projekcie so samostatnými obrázkami bodov. V tomto prípade zA > z B. Z toho vyplýva, že projekcia je viditeľná A 1.
Body C A D na uvažovanom komplexnom výkrese (obr. 6) sú tiež na rovnakom vyčnievajúcom nosníku, ale len rovnobežne s osou 0R. Preto z porovnania y C > y D usudzujeme, že projekcia C 2 je viditeľná.
Všeobecné pravidlo. Viditeľnosť pre zodpovedajúce projekcie konkurenčných bodov je určená porovnaním súradníc týchto bodov v smere spoločného projekčného lúča. Viditeľný je priemet bodu, ktorého súradnica je väčšia. V tomto prípade sa súradnice porovnávajú na projekčnej rovine so samostatnými obrazmi bodov.
Poloha bodu v priestore môže byť určená jeho dvoma kolmými projekciami, napríklad horizontálnym a čelným, čelným a profilovým. Kombinácia dvoch ľubovoľných ortogonálnych projekcií umožňuje zistiť hodnotu všetkých súradníc bodu, zostrojiť tretiu projekciu a určiť oktant, v ktorom sa nachádza. Pozrime sa na niekoľko typických problémov z kurzu deskriptívnej geometrie.
Pre daný komplexný výkres bodov A a B je potrebné:
Najprv určme súradnice bodu A, ktoré môžeme zapísať v tvare A (x, y, z). Horizontálny priemet bodu A - bod A", ktorý má súradnice x, y. Narysujme kolmice z bodu A" na osi x, y a nájdime A x, A y, resp. Súradnica x pre bod A sa rovná dĺžke segmentu A x O so znamienkom plus, pretože A x leží v oblasti kladných hodnôt osi x. Ak vezmeme do úvahy mierku výkresu, nájdeme x = 10. Súradnica y sa rovná dĺžke segmentu Ay O so znamienkom mínus, pretože t. Ay leží v oblasti záporných hodnôt os y. Berúc do úvahy mierku výkresu, y = –30. Čelný priemet bodu A - bod A"" má súradnice x a z. Pustime kolmicu z A"" na os z a nájdeme A z. Súradnica z bodu A sa rovná dĺžke segmentu Az O so znamienkom mínus, pretože Az leží v oblasti záporných hodnôt osi z. Berúc do úvahy mierku výkresu z = –10. Súradnice bodu A sú teda (10, –30, –10).
Súradnice bodu B môžeme zapísať ako B (x, y, z). Uvažujme vodorovný priemet bodu B - bod B". Keďže leží na osi x, potom B x = B" a súradnica B y = 0. Súradnica x bodu B sa rovná dĺžke úsečky B x O so znamienkom plus. Berúc do úvahy mierku výkresu x = 30. Čelný priemet bodu B je t. B˝ má súradnice x, z. Nakreslíme kolmicu z B"" na os z, čím nájdeme B z. Aplikácia z bodu B sa rovná dĺžke segmentu B z O so znamienkom mínus, pretože B z leží v oblasti záporných hodnôt osi z. S prihliadnutím na mierku výkresu určíme hodnotu z = –20. Takže súradnice B sú (30, 0, -20). Všetky potrebné konštrukcie sú znázornené na obrázku nižšie.

Konštrukcia projekcií bodov
Body A a B v rovine P 3 majú tieto súradnice: A""" (y, z); B""" (y, z). V tomto prípade A"" a A""" ležia na rovnakej kolmici na os z, pretože majú spoločnú súradnicu z. Podobne B"" a B""" ležia na spoločnej kolmici na os z. Aby sme našli projekciu profilu bodu A, vykreslíme pozdĺž osi y hodnotu zodpovedajúcej súradnice nájdenej skôr. Na obrázku sa to robí pomocou kruhového oblúka s polomerom A y O. Potom nakreslite kolmicu z A y, kým sa nepretne s kolmicou obnovenou z bodu A"" k osi z. Priesečník týchto dvoch kolmíc určuje polohu A""".
Bod B""" leží na osi z, pretože súradnica y tohto bodu je nula. Ak chcete nájsť profilový priemet bodu B v tejto úlohe, stačí nakresliť kolmicu z B"" na os z. priesečník tejto kolmice s osou z je B """.

Určenie polohy bodov v priestore
Vizuálnym predstavením si priestorového usporiadania zloženého z projekčných rovín P 1, P 2 a P 3, umiestnenia oktantov, ako aj poradia transformácie usporiadania do diagramov, môžete priamo určiť, že bod A sa nachádza v oktante III. a bod B leží v rovine P2.
Ďalšou možnosťou riešenia tohto problému je metóda výnimiek. Napríklad súradnice bodu A sú (10, -30, -10). Kladná úsečka x nám umožňuje posúdiť, že bod sa nachádza v prvých štyroch oktantoch. Záporná súradnica y znamená, že bod je v druhom alebo treťom oktante. Nakoniec negatívna aplikácia z znamená, že bod A sa nachádza v treťom oktante. Nasledujúca tabuľka jasne ilustruje vyššie uvedené úvahy.
| Oktanty | Súradnicové znaky | ||
| X | r | z | |
| 1 | + | + | + |
| 2 | + | – | + |
| 3 | + | – | – |
| 4 | + | + | – |
| 5 | – | + | + |
| 6 | – | – | + |
| 7 | – | – | – |
| 8 | – | + | – |
Súradnice bodu B (30, 0, -20). Keďže ordináta bodu B je nula, tento bod leží v premietacej rovine P2. Pozitívna úsečka a negatívna aplikácia t.B indikujú, že sa nachádza na hranici tretieho a štvrtého oktantu.
Zostrojenie vizuálneho obrazu bodov v sústave rovín P 1, P 2, P 3

Pomocou čelnej izometrickej projekcie sme postavili priestorové usporiadanie oktantu III. Je to obdĺžnikový trojsten, ktorého steny sú roviny P 1, P 2, P 3 a uhol (-y0x) je 45 °. V tomto systéme budú segmenty pozdĺž osí x, y, z vykreslené v prirodzenej veľkosti bez skreslenia.
Začnime vytvárať vizuálny obraz bodu A (10, -30, -10) s jeho vodorovnou projekciou A. Po vynesení príslušných súradníc pozdĺž osi x a osi y nájdeme body A x a A y. Priesečník kolmice zrekonštruovaný z A x a A y na osi x a y určuje polohu bodu A“. Odložením od A" rovnobežne s osou z smerom k jeho záporným hodnotám segmentu AA", ktorého dĺžka je 10, nájdeme polohu bodu A.
Vizuálny obraz bodu B (30, 0, -20) je konštruovaný podobným spôsobom - v rovine P2 pozdĺž osi x a z musíte vykresliť zodpovedajúce súradnice. Priesečník kolmíc zrekonštruovaný z B x a B z určí polohu bodu B.
Uvažujme priemety bodov do dvoch rovín, pre ktoré zoberieme dve na seba kolmé roviny (obr. 4), ktoré budeme nazývať horizontálne frontálne a roviny. Priesečník týchto rovín sa nazýva os projekcie. Jeden bod A premietneme na uvažované roviny pomocou rovinnej projekcie. Na to je potrebné spustiť kolmice Aa a A z daného bodu na uvažované roviny.
Priemet na vodorovnú rovinu sa nazýva horizontálna projekcia bodov A a projekcia A? na frontálnej rovine je tzv čelná projekcia.
Body, ktoré sa majú premietnuť, sa v deskriptívnej geometrii zvyčajne označujú veľkými písmenami A, B, C. Malé písmená sa používajú na označenie vodorovných priemetov bodov a, b, c... Čelné výčnelky sú označené malými písmenami s ťahom v hornej časti a?, b?, c?…
Body sú tiež označené rímskymi číslicami I, II,... a pre ich priemet - arabskými číslicami 1, 2... a 1?, 2?...
Otočením vodorovnej roviny o 90° získate výkres, v ktorom sú obe roviny v rovnakej rovine (obr. 5). Tento obrázok sa volá diagram bodu.

Cez kolmé čiary Aha A Čo? Nakreslíme si rovinu (obr. 4). Výsledná rovina je kolmá na čelnú a vodorovnú rovinu, pretože obsahuje kolmice na tieto roviny. Preto je táto rovina kolmá na priesečník rovín. Výsledná priamka pretína vodorovnú rovinu v priamke aha x a čelná rovina – v priamke a?a X. Priamo aah a a?a x sú kolmé na os priesečníka rovín. Teda Aahaha? je obdĺžnik.
Pri kombinácii horizontálnej a čelnej projekčnej roviny A A A? bude ležať na rovnakej kolmici na os priesečníka rovín, pretože keď sa horizontálna rovina otáča, kolmosť segmentov aha x a a?a x sa nezlomí.
Dostaneme to na projekčnom diagrame A A A? nejaký bod A ležia vždy na tej istej kolmici na os priesečníka rovín.
Dve projekcie a a A? určitého bodu A dokáže jednoznačne určiť jeho polohu v priestore (obr. 4). Potvrdzuje to skutočnosť, že pri konštrukcii kolmice z priemetu a na vodorovnú rovinu bude prechádzať bodom A. Rovnakým spôsobom kolmica z priemetu. A? do frontálnej roviny prejde bodom A, teda bod A je súčasne na dvoch špecifických priamkach. Bod A je ich priesečník, to znamená, že je určitý.
Zvážte obdĺžnik Aaa X A?(obr. 5), pre ktoré platia nasledujúce tvrdenia:
1) Bodová vzdialenosť A od čelnej roviny sa rovná vzdialenosti jej horizontálneho priemetu a od osi priesečníka rovín, t.j.
Čo? = aha X;
2) vzdialenosť bodov A od vodorovnej roviny priemetov sa rovná vzdialenosti jeho čelného priemetu A? od osi priesečníka rovín, t.j.
Aha = a?a X.
Inými slovami, aj bez samotného bodu na diagrame, len pomocou jeho dvoch projekcií, môžete zistiť, v akej vzdialenosti sa daný bod nachádza od každej z projekčných rovín.
Priesečník dvoch premietacích rovín rozdeľuje priestor na štyri časti, ktoré sú tzv v štvrtiach(obr. 6).
Os priesečníka rovín rozdeľuje horizontálnu rovinu na dve štvrtiny - prednú a zadnú a prednú rovinu - na hornú a dolnú štvrtinu. Horná časť frontálnej roviny a predná časť horizontálnej roviny sa považujú za hranice prvej štvrtiny.

Pri príjme diagramu sa horizontálna rovina otáča a je zarovnaná s čelnou rovinou (obr. 7). V tomto prípade sa predná časť vodorovnej roviny zhoduje so spodnou časťou prednej roviny a zadná časť vodorovnej roviny sa zhoduje s hornou časťou prednej roviny.

Obrázky 8-11 zobrazujú body A, B, C, D, ktoré sa nachádzajú v rôznych častiach priestoru. Bod A sa nachádza v prvej štvrtine, bod B je v druhej, bod C je v tretej a bod D je vo štvrtej.

Keď sa body nachádzajú v prvej alebo štvrtej štvrtine z nich horizontálne projekcie sú na prednej časti vodorovnej roviny a na diagrame budú ležať pod osou priesečníka rovín. Keď sa bod nachádza v druhej alebo tretej štvrtine, jeho horizontálny priemet bude ležať na zadnej strane horizontálnej roviny a na diagrame bude umiestnený nad osou priesečníka rovín.

Čelné projekcie body, ktoré sa nachádzajú v prvej alebo druhej štvrtine, budú ležať v hornej časti čelnej roviny a na diagrame budú umiestnené nad osou priesečníka rovín. Keď sa bod nachádza v tretej alebo štvrtej štvrtine, jeho čelný priemet je pod osou priesečníka rovín.
Najčastejšie sa v reálnych konštrukciách postava umiestňuje do prvej štvrtiny priestoru.
V niektorých špeciálnych prípadoch bod ( E) môže ležať na vodorovnej rovine (obr. 12). V tomto prípade sa jeho horizontálny priemet e a samotný bod zhodujú. Čelný priemet takéhoto bodu bude umiestnený na osi priesečníka rovín.
V prípade, že bod TO leží na frontálnej rovine (obr. 13), jej horizontálny priemet k leží na osi priesečníka rovín a čelnej k? ukazuje skutočnú polohu tohto bodu.

Pre takéto body je znakom toho, že leží na jednej z projekčných rovín, že jeden z jej priemetov je na osi priesečníka rovín.
Ak bod leží na osi priesečníka rovín premietania, on a oba jeho priemety sa zhodujú.
Keď bod neleží v projekčných rovinách, volá sa bod všeobecnej polohy. V nasledujúcom texte, ak neexistujú žiadne špeciálne značky, predmetný bod je bodom vo všeobecnej polohe.
2. Nedostatok projekčnej osi
Aby sme vysvetlili, ako získať projekcie bodu na model kolmý na premietaciu rovinu (obr. 4), je potrebné vziať si kus hrubého papiera v tvare podlhovastého obdĺžnika. Medzi projekciami je potrebné ho ohnúť. Čiara ohybu bude predstavovať os priesečníka rovín. Ak sa potom ohnutý kus papiera opäť narovná, dostaneme diagram podobný tomu, ktorý je znázornený na obrázku.
Kombináciou dvoch rovín premietania s rovinou výkresu je možné nezobraziť líniu ohybu, t.j. nenakresliť os priesečníka rovín do diagramu.
Pri vykresľovaní do diagramu by ste mali vždy umiestniť projekcie A A A? bod A na jednej zvislej priamke (obr. 14), ktorá je kolmá na os priesečníka rovín. Preto, aj keď poloha osi priesečníka rovín zostáva neistá, ale jej smer je určený, os priesečníka rovín môže byť umiestnená iba na diagrame kolmom na priamku. čo?.

Ak na diagrame bodu nie je žiadna projekčná os, ako na prvom obrázku 14a, môžete si predstaviť polohu tohto bodu v priestore. Ak to chcete urobiť, nakreslite kdekoľvek kolmo na priamku čo? os projekcie, ako na druhom obrázku (obr. 14) a ohnite výkres pozdĺž tejto osi. Ak obnovíme kolmice v bodoch A A A? než sa pretnú, môžete získať bod A. Pri zmene polohy projekčnej osi sa získajú rôzne polohy bodu vzhľadom na projekčné roviny, ale neistota polohy projekčnej osi neovplyvňuje vzájomnú polohu viacerých bodov alebo obrazcov v priestore.
3. Priemet bodu do troch premietacích rovín
Zoberme si profilovú rovinu projekcií. Projekcie do dvoch na seba kolmých rovín väčšinou určujú polohu postavy a umožňujú zistiť jej skutočnú veľkosť a tvar. Sú však chvíle, keď dve projekcie nestačia. Potom sa použije konštrukcia tretej projekcie.
Tretia premietacia rovina je nakreslená tak, aby bola kolmá na obe premietacie roviny súčasne (obr. 15). Tretia rovina sa zvyčajne nazýva profilu.
V takýchto konštrukciách sa nazýva spoločná priamka horizontálnej a čelnej roviny os X , spoločná priamka vodorovnej a profilovej roviny – os pri , a spoločná priamka čelnej a profilovej roviny je os z . Bodka O, ktorý patrí do všetkých troch rovín, sa nazýva počiatočný bod.

Obrázok 15a znázorňuje bod A a tri jeho projekcie. Projekcia na rovinu profilu ( A??) sa volajú projekcia profilu a označujú A??.
Získať diagram bodu A, ktorý pozostáva z troch projekcií a, a, a, je potrebné zrezať trojsten tvorený všetkými rovinami pozdĺž osi y (obr. 15b) a spojiť všetky tieto roviny s rovinou čelného priemetu. Horizontálna rovina sa musí otáčať okolo osi X a rovina profilu je okolo osi z v smere označenom šípkou na obrázku 15.
Obrázok 16 znázorňuje polohu výstupkov hej, hej? A A?? bodov A, získaný spojením všetkých troch rovín s rovinou výkresu.
V dôsledku rezu sa os y objaví na dvoch rôznych miestach diagramu. Na vodorovnej rovine (obr. 16) zaujme zvislú polohu (kolmo na os). X), a na rovine profilu – horizontálne (kolmo na os z).

Na obrázku 16 sú tri projekcie hej, hej? A A?? body A majú presne definovanú polohu na diagrame a podliehajú jednoznačným podmienkam:
A A A? by mali byť vždy umiestnené na rovnakej zvislej čiare, kolmej na os X;
A? A A?? by mala byť vždy umiestnená na rovnakej vodorovnej priamke, kolmej na os z;
3), keď sa vykonáva cez vodorovnú projekciu a vodorovnú priamku a cez profilovú projekciu A??– vertikálna priamka, zostrojené priamky sa budú nevyhnutne pretínať na osi uhla medzi osami premietania, pretože obr. Oa pri A 0 A n – štvorec.
Pri konštrukcii troch priemetov bodu musíte skontrolovať, či sú pre každý bod splnené všetky tri podmienky.
4. Súradnice bodu
Polohu bodu v priestore možno určiť pomocou troch čísel, ktoré sa nazývajú jeho súradnice. Každá súradnica zodpovedá vzdialenosti bodu od niektorej projekčnej roviny.
Určená vzdialenosť bodu A k rovine profilu je súradnica X, kde X = huh?(obr. 15), vzdialenosť k frontálnej rovine je súradnica y a y = huh? a vzdialenosť od vodorovnej roviny je súradnica z, kde z = aA.
Na obrázku 15 zaberá bod A šírku pravouhlého rovnobežnostena a rozmery tohto rovnobežnostena zodpovedajú súradniciam tohto bodu, t.j. každá zo súradníc je znázornená na obrázku 15 štyrikrát, t.j.
x = a?A = Oa x = aya = aza?;
y = а?А = Оа y = а x а = а z а?;
z = aA = Oa z = a x a? = a y a?.
V diagrame (obr. 16) sa súradnice x a z objavujú trikrát:
x = a z a?= Oa x = a y a,
z = a x a? = Oa z = a y a?.
Všetky segmenty, ktoré zodpovedajú súradniciam X(alebo z), sú navzájom paralelné. Koordinovať pri znázornené dvakrát vertikálne umiestnenou osou:
y = Oa y = a x a
a dvakrát – umiestnené vodorovne:
y = Oa y = az a?.
Tento rozdiel sa prejavuje v dôsledku skutočnosti, že os y je na diagrame prítomná v dvoch rôznych polohách.
Malo by sa vziať do úvahy, že poloha každej projekcie je na diagrame určená iba dvoma súradnicami, a to:
1) horizontálne – súradnice X A pri,
2) frontálne – súradnice X A z,
3) profil – súradnice pri A z.
Pomocou súradníc x, y A z, môžete zostrojiť projekcie bodu na diagrame.
Ak je bod A daný súradnicami, ich záznam je definovaný nasledovne: A ( X; y; z).
Pri konštrukcii bodových projekcií A musia sa skontrolovať tieto podmienky:
1) horizontálne a čelné projekcie A A A? X X;
2) čelné a profilové projekcie A? A A? musia byť umiestnené v rovnakej kolmej polohe na os z, keďže majú spoločnú súradnicu z;
3) horizontálna projekcia a tiež odstránená z osi X, ako je projekcia profilu A preč od osi z, pretože projekcie ah? a eh? majú spoločnú súradnicu pri.
Ak bod leží v niektorej z projekčných rovín, potom sa jedna z jeho súradníc rovná nule.
Keď bod leží na projekčnej osi, dve z jeho súradníc sa rovnajú nule.
Ak bod leží v počiatku, všetky jeho tri súradnice sú nulové.
|
Slovesná forma |
Grafická forma |
|
1. Na osi X, Y, Z nakreslite zodpovedajúce súradnice bodu A. Získame body A x, A y, A z | |
|
2. Horizontálny priemet A 1 sa nachádza v priesečníku komunikačných čiar z bodov A x a A y vedených rovnobežne s osami X a Y. |
|
|
3. Čelná projekcia A 2 sa nachádza v priesečníku komunikačných čiar z bodov A x a A z vedených rovnobežne s osami X a Z |
|
|
4. Priemet profilu A 3 sa nachádza v priesečníku komunikačných čiar z bodov A z a A y vedených rovnobežne s osami Z a Y |
|
3.2. Poloha bodu vzhľadom na projekčné roviny
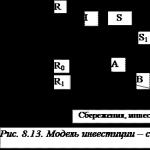
Poloha bodu v priestore vzhľadom na projekčné roviny je určená jeho súradnicami. Súradnica X určuje vzdialenosť bodu od roviny P 3 (priemet na P 2 alebo P 1), súradnica Y určuje vzdialenosť od roviny P 2 (priemet na P 3 alebo P 1), súradnica Z určuje vzdialenosť od roviny P 1 (projekcia na P 3 alebo P 2). V závislosti od hodnoty týchto súradníc môže bod zaberať všeobecnú aj konkrétnu polohu v priestore vo vzťahu k projekčným rovinám (obr. 3.1).

Ryža. 3.1. Bodová klasifikácia
Tbodovvšeobecnýustanovenia. Súradnice všeobecného bodu sa nerovnajú nule ( X≠0, r≠0, z≠0 ), a v závislosti od znamienka súradnice sa bod môže nachádzať v jednom z ôsmich oktantov (tabuľka 2.1).
Na obr. 3.2 poskytuje nákresy bodov vo všeobecnej polohe. Analýza ich obrázkov nám umožňuje dospieť k záveru, že sa nachádzajú v nasledujúcich oktantoch priestoru: A(+X;+Y; +Z( Ioktant;B(+X;+Y;-Z( IVoktant;C(-X;+Y; +Z( Voktant;D(+X;+Y; +Z( IIoktant.
Body osobitného postavenia. Jedna zo súradníc v bode konkrétnej polohy sa rovná nule, takže projekcia bodu leží na príslušnom projekčnom poli, ďalšie dve - na osiach projekcie. Na obr. 3.3 takými bodmi sú body A, B, C, D, G.A P3, potom bod X A = 0; IN P3, potom bod X B = 0; S П 2, potom bod Y C = 0;D P 1, potom bod Z D = 0.
Bod môže patriť do dvoch premietacích rovín naraz, ak leží na priesečníku týchto rovín - osi premietania. Pre takéto body nie je nula iba súradnica na tejto osi. Na obr. 3.3 takým bodom je bod G(G OZ, potom bod X G = 0, Y G = 0).


3.3. Relatívna poloha bodov v priestore
Uvažujme tri možnosti relatívneho usporiadania bodov v závislosti od pomeru súradníc, ktoré určujú ich polohu v priestore.
Na obr. 3,4 body A a B majú rôzne súradnice.
Ich relatívnu polohu možno posúdiť podľa ich vzdialenosti od premietacích rovín: Y A >Y B, potom bod A leží ďalej od roviny P 2 a bližšie k pozorovateľovi ako bod B; Z A >Z B, potom bod A leží ďalej od roviny P 1 a bližšie k pozorovateľovi ako bod B; X A Na obr. 3.5 sú zobrazené body A, B, C, D, pre ktoré je jedna zo súradníc rovnaká a ostatné dve sú rôzne. Ich relatívnu polohu možno posúdiť podľa ich vzdialenosti od projekčných rovín takto: Y A =Y B =Y D, potom sú body A, B a D rovnako vzdialené od roviny P 2 a ich horizontálne a profilové priemety sú umiestnené na priamkach [A 1 B 1 ]llОХ a [A 3 B 3 ] llOZ. Geometrické umiestnenie takýchto bodov je rovina rovnobežná s P2; Z A =Z B =Z C, potom body A, B a C sú rovnako vzdialené od roviny P 1 a ich čelné a profilové priemety sú umiestnené na priamkach [A 2 B 2 ] llОХ a [A 3 C 3 ] llOY. Geometrické umiestnenie takýchto bodov je rovina rovnobežná s P 1; X A =X C =X D, potom body A, C a D sú rovnako vzdialené od roviny P 3 a ich horizontálne a čelné priemety sú umiestnené na priamkach [A 1 C 1 ] 11OY a [A 2 D 2 ] 11OZ . Geometrické umiestnenie takýchto bodov je rovina rovnobežná s P3. 3. Ak majú body rovnaké dve súradnice rovnakého mena, potom sa volajú súťažiť. Konkurenčné body sú umiestnené na rovnakej projekčnej čiare. Na obr. 3.3 existujú tri dvojice takých bodov, pre ktoré platí: X A = X D ; YA = YD; Z D > Z A; XA = Xc; ZA = Zc; Yc > YA; YA = YB; ZA = ZB; XB > XA. Existujú horizontálne konkurenčné body A a D, umiestnené na horizontálne vyčnievajúcej čiare AD, čelne konkurenčné body A a C, umiestnené na čelne vyčnievajúcej čiare AC, profilové konkurenčné body A a B, umiestnené na profilovej vyčnievajúcej čiare AB. Závery k téme 1. Bod je lineárny geometrický obraz, jeden zo základných pojmov deskriptívnej geometrie. Poloha bodu v priestore môže byť určená jeho súradnicami. Každý z troch priemetov bodu je charakterizovaný dvoma súradnicami, ich názvy zodpovedajú názvom osí, ktoré tvoria príslušnú projekčnú rovinu: horizontálne - A 1 (XA; YA); frontálny – A 2 (XA; ZA); profil – A 3 (YA; ZA). Preklad súradníc medzi projekciami sa vykonáva pomocou komunikačných liniek. Pomocou dvoch projekcií môžete vytvoriť projekcie bodu buď pomocou súradníc alebo graficky. 3. Bod vo vzťahu k projekčným rovinám môže zaujímať všeobecnú aj konkrétnu polohu v priestore. 4. Bod vo všeobecnej polohe je bod, ktorý nepatrí do žiadnej premietacej roviny, t.j. leží v priestore medzi premietacími rovinami. Súradnice generického bodu sa nerovnajú nule (x≠0,y≠0,z≠0). 5. Bod určitej polohy je bod patriaci do jednej alebo dvoch projekčných rovín. Jedna zo súradníc v bode konkrétnej polohy sa rovná nule, takže priemet bodu leží na príslušnom poli projekčnej roviny, ďalšie dve - na osiach projekcie. 6. Súťažné body – body, ktorých súradnice rovnakého názvu sa zhodujú. Existujú horizontálne konkurenčné body, čelné konkurenčné body, profilové konkurenčné body. Kľúčové slová Súradnice bodu Všeobecný bod Súkromný bod Súťažné body Metódy činnosti potrebné na riešenie problémov – zostrojenie bodu podľa daných súradníc v sústave troch projekčných rovín v priestore; – zostrojenie bodu podľa daných súradníc v sústave troch premietacích rovín na zložitý výkres. Samotestovacie otázky 1. Ako vzniká súvislosť medzi umiestnením súradníc na zložitom výkrese v sústave troch priemetov P 1 P 2 P 3 so súradnicami bodových priemetov? 2. Aké súradnice určujú vzdialenosť bodov od vodorovnej, čelnej, projekčnej roviny profilu? 3. Aké súradnice a priemetne bodu sa zmenia, ak sa bod bude pohybovať v smere kolmom na profilovú rovinu priemetov P 3? 4. Aké súradnice a priemet bodu sa zmenia, ak sa bod bude pohybovať v smere rovnobežnom s osou OZ? 5. Aké súradnice určujú horizontálny (čelný, profilový) priemet bodu? 7. V akom prípade sa priemet bodu zhoduje so samotným bodom v priestore a kde sa nachádzajú ďalšie dva priemetne tohto bodu? 8. Môže bod patriť súčasne do troch premietacích rovín a v akom prípade? 9. Ako sa nazývajú body, ktorých projekcie rovnakého mena sa zhodujú? 10. Ako môžete určiť, ktorý z dvoch bodov je bližšie k pozorovateľovi, ak sa ich čelné projekcie zhodujú? Úlohy na samostatné riešenie 2. Zostrojte priemety bodov A a B podľa ich súradníc na vizuálnom obrázku a komplexnom výkrese: A(13,5; 20), B(6,5; –20). Zostrojte priemet bodu C, ktorý je symetricky umiestnený k bodu A vzhľadom na čelnú rovinu priemetov P 2. 3. Zostrojte priemety bodov A, B, C podľa ich súradníc na vizuálny obraz a komplexný výkres: A(–20; 0; 0), B(–30; -20; 10), C(–10, -15, 0). Zostrojte bod D, umiestnený symetricky k bodu C vzhľadom na os OX. Príklad riešenia typického problému Úloha 1. Sú uvedené súradnice X, Y, Z bodov A, B, C, D, E, F (tabuľka 3.3)
Články k téme