Användbara resurser för att skapa en robot med egna händer. Gör en robot hemma själv? Lätt! Järnrobotar gör det själv
Jag bestämde mig för att gå smidigt till dynamiska rörliga modeller. Detta är ett projekt av en liten hemgjord robot på IR-kontroll, monterad från enkla och tillgängliga delar. I hjärtat - två mikrokontroller. Sändning från fjärrkontrollen ger PIC12F675, och mottagardelen till motorstyrenheten är implementerad på PIC12F629.
Robots schema på mikrokontroller

Med den digitala delen gick allt smidigt, problemet var bara i "framdrivningssystemet" - små växellådor som är mycket svåra att göra hemma, så jag var tvungen att utveckla idén. " vibrochock". Mikromotorerna styrs genom förstärkning av transistoromkopplarna på BC337. De kan bytas ut av andra små n-p-n-transistorer med en kollektorström på 0,5 A.

Storleken visade sig vara mycket liten - i bilden jämfördes den med ett mynt och fortfarande nära en matchbox. Robots ögon är gjorda av LED-ljus med hög ljusstyrka, fast vid små elektrolytkondensatorer.

Diskutera artikel SMALL MODEL ROBOT

Många av oss som stötte på datateknik drömde om att montera en robot. För att den här enheten ska kunna utföra vissa uppgifter hemma, till exempel, ta med öl. Allt på en gång tar på sig skapandet av den mest komplexa roboten, men bryter ofta snabbt i resultaten. Vi tog inte med vår första robot, som skulle göra en krossa av marker. Därför måste du börja med en enkel och gradvis komplicera ditt djur. Nu kommer vi att berätta hur du kan skapa en enkel robot med egna händer, som kommer att röra sig självständigt runt din lägenhet.
koncept
Vi har satt oss en enkel uppgift, att göra en inte komplicerad robot. Ser framåt, jag säger att vi naturligtvis lyckades inte med femton minuter, men med en mycket längre period. Men det kan ändå ske på en kväll.
Vanligtvis är dessa hantverk gjorda under åren. Människor handlar på jakt efter rätt redskap i flera månader. Men vi insåg genast - det här är inte vår väg! Därför använder vi i konstruktionen sådana detaljer som lätt kan hittas för hand eller tvingas ur den gamla tekniken. Som en sista utväg, köp för pennies i någon radioaffär eller på marknaden.
En annan idé var att göra våra hantverk så billigt som möjligt. En sådan robot finns i elektroniska butiker värda 800 till 1500 rubel! Vad säljer det i form av delar, och du måste fortfarande samla det, och inte det faktum att efter det kommer det också att fungera. Tillverkare av sådana kit glömmer ofta att sätta några delar och det är det - roboten går förlorad tillsammans med pengarna! Varför behöver vi sådan lycka? Vår robot ska inte vara dyrare än 100-150 rubel, inklusive motorer och batterier. Samtidigt, om du väljer ut motorerna från en gammal barnvagn, kommer priset i allmänhet att vara ca 20-30 rubel! Du känner dig som en besparing, medan du får en bra kamrat.
Nästa del var vad vår snygging man skulle göra. Vi bestämde oss för att skapa en robot som letar efter ljuskällor. Om ljuskällan vänder, styr vår maskin efter det. Detta begrepp heter "roboten vill leva." Det är möjligt att han kommer att behöva byta batterierna med solceller och sedan letar han efter ljuset att köra.
Nödvändiga delar och verktyg
Vad behöver vi för tillverkningen av vårt barn? Eftersom begreppet improviserade medel behöver vi ett kretskort, eller till och med den vanliga tjock kartongen. I kartongen kan du använda en awl för att göra hål för att fästa alla detaljer. Vi kommer att använda installationsprogrammet, eftersom det var till hands, och du kommer inte hitta kartong i mitt hus under dagen. Detta blir det chassi som vi monterar resten av roboten på, fixar motorerna och sensorerna. Som drivkraft använder vi tre eller fem volt motorer som kan plockas ut från den gamla skrivmaskinen. Hjulen kommer att vara tillverkade av plastflaskor, till exempel från Coca-Cola.

Tre-voltsfototransistorer eller fotodioder används som sensorer. De kan plockas ut även från en gammal optomekanisk mus. Det finns infraröda sensorer i det (i vårt fall var de svarta). Där paras de, det vill säga två fotoceller i en flaska. Med testaren förhindrar ingenting att ta reda på vilket ben som är avsedd för. Kontrollelementet kommer att vara de inbyggda transistorerna 816G. Vi använder trefinger-typ batterier lödda till varandra som strömkällor. Eller du kan ta batterifacket från den gamla skrivmaskinen, som vi gjorde. För installationen är det nödvändigt att ansluta. För dessa ändamål, idealiska ledningar från twisted pair, som i huset av någon självrespektiv hackare bör vara heaps. För fixering av alla delar är det lämpligt att använda smältlim. Denna vackra uppfinning smälter snabbt och sätter lika snabbt, vilket gör att du snabbt kan arbeta med det och montera enkla element. Fastnat är perfekt för sådana hantverk och jag har använt det mer än en gång i mina artiklar. Vi behöver också en hård tråd, för den kommer att komma ut från det vanliga pappersklippet.
Vi monterar systemet

Så vi fick alla detaljer och sätter dem på vårt skrivbord. Lödjärnet är redan smoldering med kolofonium och du gnuggar dina händer, längtan efter montering, men låt oss börja. Ta en bit montage och skära den till den framtida roboten. För skärning av PCB använd sax för metall. Vi gjorde en fyrkant med en sida på ca 4-5 cm. Huvuddelen är att vårt milda schema passar in i det, två batterier för strömförsörjning och framhjuls hårdvara. Så att brädet inte är skottigt och smidigt kan du bearbeta det med en fil och även ta bort skarpa kanter. Nästa steg kommer att täta sensorerna. Fototransistorer och fotodioder har plus och minus, med andra ord en anod och en katod. Det är nödvändigt att observera polariteten av deras inkludering, vilket är lätt att bestämma med en enkel tester. Om du gör ett misstag kommer ingenting att brinna, men roboten kommer inte att köra. Sensorerna är lödda i hörnen av kretskortet på ena sidan så att de ser sidled. De borde inte vara helt förseglade till brädan, men lämnade någonstans runt en och en halv centimeter slutsatser så att de lätt kan böjas i någon riktning - i framtiden kommer vi att behöva det här när vi installerar vår robot. Dessa kommer att vara våra ögon, de borde vara på samma sida av vårt chassi, vilket i framtiden kommer att vara robotens framsida. Det kan omedelbart noteras att vi samlar in två styrkretsar: en för styrning av höger och andra för vänster motorer.

Lite bort från chassiets framkant, bredvid våra sensorer, behöver du lödda transistorerna. För att försegla och montera det ytterligare systemet, lödde vi båda transistorerna med våra "markeringar" mot det högra hjulet. Omedelbart bör det noteras placeringen av transistorns ben. Om du tar transistorn i hand, vrid metallens baksida mot dig och markeringen till skogen (som i en saga), och benen pekar ner, då från vänster till höger, kommer benen att vara: bas, kollektor och emitter. Om du tittar på diagrammet där transistorn visas, kommer basen att vara en vinkel vinkelrätt mot ett tjockt segment i en cirkel, en emitter är en trollstav med en pil, en samlare är samma trollstav utan pil. Här verkar allt vara tydligt. Förbered batterierna och fortsätt till den elektriska kretsens omedelbara montering. Ursprungligen tog vi bara trefingerbatterier och lödde dem i följd. Du kan omedelbart sätta dem i en speciell hållare för batterier, som, som sagt, dras ut ur den gamla barnens bil. Nu löddar vi trådarna till batterierna och bestämmer på våra brädor två nyckelpunkter där alla ledningar kommer att konvergera. Det kommer att vara plus och minus. Vi gjorde det enkelt - vi vred det snodda paret i brädets kanter, lödde ändarna till transistorerna och fotosensorerna, gjorde en vriden slinga och lödde batterierna där. Kanske inte det bästa alternativet, men det mest praktiska. Nå, nu förbereder vi ledningarna, och fortsätter till sammansättningen av elektriker. Vi kommer att gå från den positiva polen till batteriet till den negativa kontakten, genom hela elkretsen. Vi tar ett par snoddar och börjar gå - löd den positiva kontakten hos båda fotosensorerna till batteriernas plus, på samma plats löddar vi transistorns sändare. Löd fotocellens andra ben med en liten bit tråd till basen av transistorn. De återstående, sista benen transyuka lödda, till motorerna. Motorns andra kontakt kan lödas till batteriet genom strömbrytaren.
Men som sann Jedi bestämde vi oss för att slå på roboten genom lödning och lödning av tråden, eftersom det inte fanns någon strömbrytare av rätt storlek i mina flaskor.
Elektriker debugging
Allt, vi har monterat den elektriska delen, nu börjar vi testa kretsen. Sätt på vårt system och ta det till den tända bordslampan. Omvända vridning av en eller annan fotocell. Och se vad som händer. Om våra motorer börjar rotera i varv med olika hastigheter, beroende på belysningen, är allt bra. Om inte, leta efter skorna i enheten. Elektronik är vetenskapen om kontakter, vilket innebär att om något inte fungerar, då någonstans finns det ingen kontakt. En viktig punkt: Den högra fotosensorn är ansvarig för vänsterhjulet och den vänstra respektive för den rätta. Nu låtsas vi i vilken riktning höger och vänster motor roterar. De borde båda vända sig framåt. Om det inte händer, måste du byta polaritet när du slår på motorn, som snurrar i fel riktning, helt enkelt genom att löda ledningarna vid motorens omkopplare. Vi utvärderar återigen motorns placering på chassit och kontrollerar rörelseriktningen i den riktning där våra sensorer är installerade. Om allt är i ordning, så går vi vidare. I vilket fall som helst kan det korrigeras, även efter att allt slutligen samlas in.
Bygg enheten
Med den tråkiga elektriska delen bestämde vi oss, fortsätt nu till mekaniken. Vi ska tillverka kåpans hjul, från plastflaskor. För framställning av framhjulet, ta de två locken och lima dem ihop.

Vi limmade runt omkretsen av den ihåliga delen inuti, för ökad stabilitet av hjulet. Vidare, precis i mitten av locket borrar vi ett hål i det första och andra locket. För borrning och alla typer av hantverk är det väldigt bekvämt att använda en Dremel, en slags liten borr med olika munstycken, fräsning, skärning och många andra. Det är mycket praktiskt att använda det för att borra hål mindre än en millimeter, där även en vanlig borr inte kan klara sig.

Efter att vi borat kepsarna sätter vi in ett förkolvt klipp i hålet.

Böj klippet i form av bokstaven "P", där hjulet danglar på den övre delen av brevet.

Nu fäster vi det här klippet mellan fotosensorer framför vår bil. Klämman är bekväm eftersom du enkelt kan justera framhjulets höjd, och vi kommer att hantera justeringen senare.
Vi vänder oss till drivhjulen. Vi kommer också att göra dem från omslag. På samma sätt borrar vi genom varje hjul strikt i mitten. Det är bäst att borra storleken på motorns axel, och helst - en bråkdel av en millimeter mindre, så att axeln är införd där, men med svårighet. Vi klär båda hjulen på motoraxeln och så att de inte hoppar av, fixar vi dem med smältning.


Det är viktigt att göra detta inte bara så att hjulen inte flyger av under rörelse, och inte heller vrider sig i stället för fästen.
Den viktigaste delen är montering av elmotorer. Vi placerar dem i slutet av vårt chassi, på motsatt sida av kretskortet, i förhållande till resten av elektroniken. Man måste komma ihåg att den styrda motorn är placerad motsatt till sitt kontrollfotosystem. Detta görs så att roboten kan tända ljuset. Rätt fotosensor, vänster motor och vice versa. Till att börja med avlyssnar vi dem med vridna parbitar, gängade genom hålen i aggregatet och vridits ovanifrån.

Vi levererar ström, och vi ser var våra motorer roterar. I det mörka rummet kommer motorerna inte att rotera, det är önskvärt att rikta lampan. Kontrollera om alla motorer fungerar. Vi roterar roboten och ser hur motorerna ändrar sin rotationshastighet beroende på belysningen. Låt oss vrida rätt fotosensor, och den vänstra motorn ska snurra smart och den andra tvärtom kommer att sakta ner. Slutligen kontrollerar vi hjulets rotationsriktning så att roboten går framåt. Om allt fungerar, som vi har beskrivit, kan du snyggt fixa reglaget med smältning.

Vi försöker göra sina hjul på samma axel. Allt - vi fixar batterierna på toppen av chassit och går till inställningarna och spelen med roboten.
Fallgropar och tuning
Den första fallgropen i vårt hantverk var oväntat. När vi sammanförde hela systemet och den tekniska delen svarade alla motorer perfekt mot ljuset, och allt tycktes gå bra. Men när vi satte vår robot på golvet - gick han inte med oss. Det visade sig att motorns kraft inte helt enkelt är tillräckligt. Jag var tvungen att snabbt skaffa en baby maskin för att få motorerna kraftigare. Förresten, om du tar motorerna från leksakerna, kommer du definitivt inte att gå vilse med sin kraft, eftersom de är konstruerade för att bära många bilar med batterier. När vi tänkte ut motorerna, fortsatte vi med att sätta upp och driva ett kosmetiskt utseende. Först måste du samla skägg av trådar som vi drar på golvet och stärka dem på chassit med varmt lim.

Om roboten drar någonstans i magen, kan du höja det främre chassit genom att böja fästet. De viktigaste fotosensorerna. Det är bäst att böja dem som ser till sidan vid trettio grader från huvudrätten. Då kommer han att fånga ljuskällorna och gå till dem. Den önskade böjningsvinkeln måste väljas experimentellt. Allt vi armar oss med en skrivbordslampa, lägger roboten på golvet, slår på den och börjar kolla och glädja över hur ditt barn tydligt följer ljuskällan och hur han finner det bra.
förbättringar
Det finns ingen gräns för perfektion och du kan lägga till funktioner i oändligheten i vår robot. Det fanns tankar att till och med lägga en kontroller, men då skulle tillverkningens kostnad och komplexitet öka flera gånger, och det här är inte vår metod.
Den första förbättringen är att göra en robot som skulle resa längs en given väg. Allt är enkelt här, en svart rand skrivs ut på skrivaren eller på samma sätt ritas den med en svart permanent markör på ett pappersark. Det viktigaste är att remsan var lite smalare än bredden på förseglade fotosensorer. Vi sänker fotocellerna ner så att de tittar på golvet. Bredvid vart och ett av våra ögon installerar vi en superljus LED i serie med ett motstånd på 470 ohm. Lysdioden med resistans löds direkt till batteriet. Tanken är enkel, från ett vitt pappersark reflekteras ljuset, det träffar vår sensor och roboten går rakt. Så snart strålen träffar den mörka remsan, kommer ljus nästan inte på fotocellen (svart papper absorberar perfekt ljus), och därför börjar en motor att rotera långsammare. En annan motor vrider snabbt roboten, jämna ut kursen. Som ett resultat rullar roboten på en svart remsa, som om den finns på skenor. Du kan rita en sådan remsa på det vita golvet och skicka roboten till köket för en öl från din dator.
Den andra tanken är att komplicera kretsen genom att lägga till två transistorer och två fotosensorer och göra roboten sökande efter ljuset inte bara från framsidan utan från alla håll, och så fort det hittades, rusade det mot det. Allt kommer bara att bero på vilken sida ljuskällan kommer att visas: om den är framför, kommer den att gå framåt, och om den ligger bakom, rullar den bakåt. Det är möjligt även i detta fall för att förenkla monteringen, använd LM293D-chipet, men det kostar ungefär hundra rubel. Men med hjälp av det kan du enkelt justera differentieringen av hjulets rotationsriktning eller, helt enkelt, robotens rörelsesriktning: framåt och bakåt.
Det sista du kan göra är att helt och hållet ta bort sittande batterier och sätta i ett solbatteri, som du nu kan köpa i mobiltelefontillbehörsbutiken (eller vid uppringning). För att förhindra att roboten fullständigt förlorar sin kapacitet i detta läge, om det oavsiktligt faller in i skuggan, är det möjligt att ansluta parallellt med solbatteriet - en elektrolytkondensator med mycket stor kapacitet (tusentals mikrofarader). Eftersom spänningen vi har där inte överstiger fem volt, då kondensatorn kan utformas för 6,3 volt. En sådan kapacitet och sådan spänning det blir ganska miniatyriserad. Kondensor kan antingen köpas eller tömas från gamla nätaggregat.
De återstående möjliga variationerna, vi tror, kan du tänka på dig själv. Om det finns något intressant - var noga med att skriva.
rön
Så vi fick veta den största vetenskapen, framstegsmotorn - cybernetik. Under 1970-talet var det väldigt populärt att designa sådana robotar. Det bör noteras att i vår skapelse tillämpades början av analog databehandling, som dog ut med tillkomsten av digital teknik. Men som jag visade i denna artikel - är inte allt förlorat. Jag hoppas att vi inte kommer att dölja konstruktionen av en så enkel robot, men vi kommer att uppfinna nya och nya mönster och kommer att överraska oss med våra intressanta hantverk. Lycka till i församlingen!
Visst, efter att ha tittat på filmer om robotar, ville du ofta bygga din kamrat, men du visste inte vart du ska börja. Naturligtvis kommer du inte att kunna bygga en två-leggig terminator, men vi strävar inte efter det här heller. Den som vet hur man korrekt håller ett lödstryk i händerna kan montera en enkel robot och behöver inte djup kunskap, även om de inte stör varandra. Amatörrobotik är inte mycket annorlunda än kretsdesign, bara mycket mer intressant, eftersom det också berörs områden som mekanik och programmering. Alla komponenter är lättillgängliga och kostsamma. Så framsteg står inte stilla, och vi kommer att använda det till vår fördel.
introduktion
So. Vad är en robot? I de flesta fall är det en automatisk enhet som svarar mot miljöpåverkan. Robotar kan styras av människor eller utföra förprogrammerade åtgärder. En robot har vanligtvis en mängd olika sensorer (avstånd, rotationsvinkel, acceleration), videokameror, manipulatorer. Robots elektroniska del består av en mikrokontroller (MK) - en mikrokrets, där processorn, klockgeneratorn, olika kringutrustning, drift och permanent minne är inneslutna. I världen finns det ett stort antal mikrokontroller för olika applikationer och det är möjligt att montera kraftfulla robotar. För amatörbyggnader används AVR-mikrokontroller ofta. De är överlägset mest tillgängliga och många exempel finns på Internet baserat på dessa MC. För att arbeta med mikrokontroller måste du kunna programmera i assembler eller C och ha grundläggande kunskaper i digital och analog elektronik. I vårt projekt kommer vi att använda C. Programmering för MK skiljer sig inte mycket från programmering på en dator, språkens syntax är densamma, de flesta funktionerna är nästan lika, och de nya är ganska lätta att lära sig och praktiska att använda.Vad vi behöver
Till att börja med kommer vår robot att kunna gå runt hinder, det vill säga att upprepa det normala beteendet hos de flesta djur i naturen. Allt vi behöver för byggandet av en sådan robot finns i radioaffärer. Bestäm hur vår robot ska röra sig. Jag tycker att de mest framgångsrika spåren som används i tankar är den mest praktiska lösningen, eftersom spåren har större permeabilitet än bilens hjul och de är lättare att hantera (för att vrida det är tillräckligt för att rotera spåren i olika riktningar). Därför behöver du någon leksakstank, där spåren roterar oberoende av varandra, så kan du köpa dem på vilken leksaksaffär som helst till ett rimligt pris. Från denna tank behöver du bara en plattform med spår och motorer med växellådor, resten kan du säkert skruva ut och kasta ut. Vi behöver också en mikrokontroller, mitt val har fallit på ATmega16 - det har tillräckligt med portar för att ansluta sensorer och kringutrustning, och i allmänhet är det ganska bekvämt. Du måste också köpa några radiokomponenter, ett lödstryk, en multimeter.Vi betalar en avgift med MK

Robotlayout
I vårt fall kommer mikrokontrollern att utföra hjärnans funktioner, men vi kommer inte att börja med det, men med strömförsörjningen av robotens hjärna. Rätt näring är en hälso-garanti, så vi börjar med hur vi matar in vår robot, eftersom det är vanligtvis där nybörjare robotbyggare misstas. Och för att vår robot ska fungera normalt behöver du använda en spänningsstabilisator. Jag föredrar L7805-chipet - det är konstruerat för att producera en stabil 5V-spänning vid utgången, vilket är vad vår mikrokontroller behöver. Men på grund av att spänningsfallet på detta chip är cirka 2,5V, måste det serveras minst 7,5V. Tillsammans med denna stabilisator används elektrolytkondensatorer för att släpa ut spänningsringningar och en diod måste ingå i kretsen för att skydda mot polaritetskoppling.
Nu kan vi göra vår mikrokontroller. Saken vid MK-DIP (det är bekvämare att lödda det) och har fyrtio slutsatser. Det finns en ADC, PWM, USART och många andra saker ombord som vi inte kommer att använda för nu. Tänk på några viktiga noder. RESET-stiftet (den 9: e delen av MK) dras upp av motståndet R1 till "plus" på strömkällan - detta måste göras! Annars kan din MC oavsiktligt tappas eller, helt enkelt, buggy. Det är också en önskvärd åtgärd, men inte obligatorisk, att ansluta RESET via den keramiska kondensatorn C1 till "marken". I diagrammet kan du också se elektrolyten vid 1000 mikrofarad, den sparar från spänningsdämpningar när motorerna körs, vilket också kommer att ha en positiv effekt på mikrokontrollens funktion. Kvartsresonatorn X1 och kondensatorerna C2, C3 bör placeras så nära som möjligt till terminalerna XTAL1 och XTAL2.
Jag kommer inte prata om hur man blinkar MK, eftersom du kan läsa om det på Internet. Vi skriver programmet i C, och jag valde CodeVisionAVR som programmeringsmiljö. Detta är en ganska bekväm miljö och är användbar för nybörjare, eftersom den har en inbyggd guiden för att skapa kod.

Min robotavgift
Motorstyrning
En lika viktig komponent i vår robot är motordrivaren, vilket gör det lättare för oss att hantera det. Aldrig och i inga fall kan du ansluta motorerna direkt till MK! Generellt kan kraftfulla belastningar inte styras direkt från mikrokontroller, annars kommer det att brinna. Använd nyckeltransistorer. För vårt fall finns det ett speciellt chip - L293D. I sådana enkla projekt försöker du alltid använda det här chipet med "D" -indexet, eftersom det har inbyggda dioder för skydd mot överbelastning. Denna microcircuit är väldigt lätt att hantera och bara få den i radioaffärer. Den finns i två DIP- och SOIC-paket. Vi kommer att använda DIP-paketet på grund av bekvämligheten med installationen ombord. L293D har en separat strömförsörjning av motorer och logik. Därför kommer vi att driva mikrokretsen från stabilisatorn (VSS-ingången) och motorerna direkt från batterierna (VS-ingången). L293D klarar en belastning på 600 mA per kanal, och den har två kanaler, det vill säga två motorer kan anslutas till en mikrokrets. Men för att vara säker, förenar vi kanalerna, och då tar det en mikro för varje motor. Det följer att L293D kommer att klara 1,2 A. För att uppnå detta är det nödvändigt att kombinera mikrofotens fötter, som visas i diagrammet. Mikrokretsen fungerar på följande sätt: När en logisk "0" appliceras på IN1 och IN2 och en logisk enhet till IN3 och IN4 roterar motorn i en riktning, och om signalerna inverteras, appliceras en logisk noll, då börjar motorn att rotera i andra riktningen. Slutsatser EN1 och EN2 är ansvariga för att möjliggöra varje kanal. Vi ansluter dem och kopplar dem till "plus" strömmen från stabilisatorn. Eftersom mikrokretsen värms upp under driften och installationen av radiatorer är problematisk för denna typ av fall, är värmen försedd med GND-benen - de är bäst olösade i ett brett kontaktområde. Det är allt för första gången du behöver veta om drivrutinerna till motorer.Obstaclesensorer
Så att vår robot kan navigera och inte slå allt, installerar vi två infraröda sensorer på den. Den enklaste sensorn består av en IR-diod som avges i det infraröda spektret och en fototransistor som kommer att få en signal från en IR-diod. Principen är detta: När det inte finns något hinder framför sensorn faller de infraröda strålarna inte på fototransistorn och det öppnas inte. Om det finns ett hinder framför sensorn, kommer strålarna från det att reflekteras och faller på transistorn - det öppnas och strömmen börjar strömma. Nackdelen med sådana sensorer är att de kan reagera annorlunda mot olika ytor och inte skyddas mot störningar - sensorn kan i övrigt utlösas av andra signaler från andra enheter. Det kan skydda mot signalmodulation, men för tillfället kommer vi inte att vara störd av detta. Till att börja med är det tillräckligt.
Den första sensorns version av min robot
Robot firmware
För att återuppliva roboten måste du skriva den fasta programvaran, det vill säga ett program som skulle ta avläsningar från sensorerna och styra motorerna. Mitt program är det enklaste, det innehåller inte komplexa strukturer och kommer att vara klart för alla. Följande två rader innehåller headerfiler för vår mikrokontroller och kommandon för att generera förseningar: #include
#include
Följande rader är villkorade, eftersom PORTC-värdena beror på hur du anslutit drivrutinen till motorerna till din mikrokontroller:
PORTC.0 = 1;
PORTC.1 = 0;
PORTC.2 = 1;
PORTC.3 = 0;
Värdet 0xFF innebär att utmatningen blir en logg. "1" och 0x00 - logg. "0".
Med följande konstruktion kontrollerar vi om det finns ett hinder framför roboten och från vilken sida det är:
Om (! (PINB & (1<
...
}
Om fototransistorn får ljuset från den infraröda dioden, sätts en logg på foten av mikrokontrollen. "0" och roboten börjar röra sig bakåt för att flytta bort från hinderet, vänd sedan, för att inte stöta på ett hinder igen och sedan gå fram igen. Eftersom vi har två sensorer, kontrollerar vi närvaron av ett hinder två gånger - till höger och till vänster och därför kan vi ta reda på vilken sida hindret är. Kommandot "delay_ms (1000)" indikerar att en sekund kommer att gå förrän nästa kommando körs.
slutsats
Jag har täckt de flesta aspekter som hjälper dig att montera din första robot. Men den här roboten slutar inte där. Om du monterar den här roboten har du många möjligheter att expandera den. Du kan förbättra robotens algoritm, till exempel vad man ska göra om hindret inte är från någon sida, men direkt framför roboten. Det gör inte heller ont för att installera kodaren - en enkel enhet som hjälper dig att hitta och hitta platsen för din robot i rymden. För tydlighet kan du installera en färg- eller monokrom-bildskärm, som kan visa användbar information - batteriladdningsnivå, avstånd till hinder, olika felsökningsinformation. Förbättring av sensorer skadar inte heller - installation av en TSOP (det här är infraröda mottagare som uppfattar signalen endast vid en viss frekvens) istället för vanliga fototransistorer. Förutom infraröda sensorer finns ultraljudssensorer, de är dyrare, och de är inte heller utan nackdelar, men nyligen blir de popularitet bland robotbyggare. För att roboten skulle kunna reagera på ett ljud skulle det vara ganska bra att installera mikrofoner med förstärkaren. Men den riktigt intressanta, tror jag, är installationen av kameran och programmeringen av datasyn baserat på den. Det finns en uppsättning specialbibliotek OpenCV, som du kan programmera igen för ansikten, rörelser i färgade beacons och en massa intressanta saker. Allt beror på din fantasi och färdigheter.Lista över komponenter:
- ATmega16 i DIP-40-paketet\u003e
- L7805 i TO-220-paketet
- L293D i DIP-16-paket x2 st.
- 0,25 W motstånd med nominella värden: 10 kΩ x1 st., 220 Ohm x4 st.
- keramiska kondensatorer: 0,1 mikrofarad, 1 mikrofarad, 22 pF
- elektrolytkondensatorer: 1000 mikrofarad x 16 V, 220 mikrofarad x 16V x2 st.
- diod 1N4001 eller 1N4004
- 16 MHz kristall
- IR-dioder: vilken som helst som är lämplig i mängden av två delar.
- fototransistorer, även vilka som helst, men reagerar endast på våglängden av infraröda strålar
Firmware-kod:
/*****************************************************Firmware för robot
MK-typ: ATmega16
Klockfrekvens: 16,000000 MHz
Om kvartsfrekvensen är annorlunda måste du ange detta i miljöinställningarna:
Projekt -\u003e Konfigurera -\u003e C Kompilatorflik
*****************************************************/
#include
#include
Radera huvud (tomrum)
{
// Ställ in portar för inmatning
// Genom dessa portar mottar vi signaler från sensorer
DDRB = 0x00;
// Slå på dragmotstånd
PORTB = 0xFF;
// Ställ in portarna för att avsluta
// Vi styr motorerna genom dessa portar
DDRC = 0xFF;
// Huvudprogramslinga. Här läser vi värdena från sensorerna.
// och drivs av motorer
medan (1)
{
// Kommer framåt
PORTC.0 = 1;
PORTC.1 = 0;
PORTC.2 = 1;
PORTC.3 = 0;
om (! (PINB & (1<
// Gå tillbaka 1 sekund
PORTC.0 = 0;
PORTC.1 = 1;
PORTC.2 = 0;
PORTC.3 = 1;
delay_ms (1000);
// omslag
PORTC.0 = 1;
PORTC.1 = 0;
PORTC.2 = 0;
PORTC.3 = 1;
delay_ms (1000);
}
om (! (PINB & (1<
// Gå tillbaka 1 sekund
PORTC.0 = 0;
PORTC.1 = 1;
PORTC.2 = 0;
PORTC.3 = 1;
delay_ms (1000);
// omslag
PORTC.0 = 0;
PORTC.1 = 1;
PORTC.2 = 1;
PORTC.3 = 0;
delay_ms (1000);
}
};
}
Om mitt arbete
För närvarande är min robot nästan komplett.
Den är utrustad med en trådlös kamera, en avståndssensor (både kameran och den här sensorn är installerade på det roterande tornet), en hindringsgivare, en kodare, en mottagare av signaler från konsolen och ett RS-232 gränssnitt för anslutning till en dator. Den fungerar i två lägen: autonom och manuellt (den mottar styrsignaler från fjärrkontrollen), kameran kan också slås på / av på distans eller av själva roboten för att spara batteriström. Jag skriver fast programvara för att skydda lägenheten (bildöverföring till en dator, rörelsedetektering, omväg runt i rummet).
Om du vill lägger jag upp videon:
UPD. Jag lade om bilderna och gjorde små korrigeringar i texten.
Hur man gör en robot hemma, så att allt fungerade? Vi måste börja med en enkel och gradvis komplicera! Instruktioner för att skapa egna robotar hemma överskred bokstavligen Internet. Författaren till artikeln kommer inte att förbli avskild från detta. I allmänhet kan denna process delas in i tre delar: teoretisk, förberedande och direktmontering. Inom ramen för artikeln kommer alla att övervägas, och ett generellt system för rengöringsutveckling kommer att beskrivas.
Skapa en robot hemma
Att utvecklas från början, är kännedom om ström, spänning, funktion av olika element som triggers, kondensatorer, motstånd, transistorer nödvändiga. Du bör också lära dig hur man lödar allt detta på diagrammen och använder anslutningskablarna. Det är nödvändigt att utarbeta alla aspekter av rörelsen och genomförandet av åtgärder och uppnå maximal detalj av åtgärder för att uppnå sitt mål. Och denna kunskap är nödvändig om du verkligen är intresserad av hur man gör en robot hemma, och inte bara ledig nyfikenhet.
Förberedande processer

Innan du börjar räkna ut hur man gör en robot hemma, måste du ta hand om de förutsättningar där den kommer att monteras. Först måste du förbereda en arbetsplats där den önskade enheten kommer att skapas. Det är nödvändigt att placera strukturen själv och dess komponenter någonstans. Det bör övervägas och frågan om lämplig placering av lödstryk, kolofonium och lödd. Arbetsplatsen ska vara så optimerad som möjligt så att det ger bekvämlighet när man interagerar med strukturen.
aggregatet

Det är nödvändigt att tänka på "ryggraden" i strukturen där allt kommer att byggas. Vanligtvis är en del vald och alla andra är lödda till den. När man talar om lödkvaliteten bör det sägas att de platser där det kommer att hållas ska rengöras. Också beroende på tjockleken på de använda trådarna och benen är det nödvändigt att hämta en tillräcklig mängd lödd så att elementen inte faller av under driften. För att förenkla processen för signalöverföring och förhindra möjligheten av en krets, kan du radera den. Sedan appliceras alla nödvändiga element på den, den resulterande strukturen är ansluten till en strömkälla och, om nödvändigt, raffineras enheten.
Enkel robot

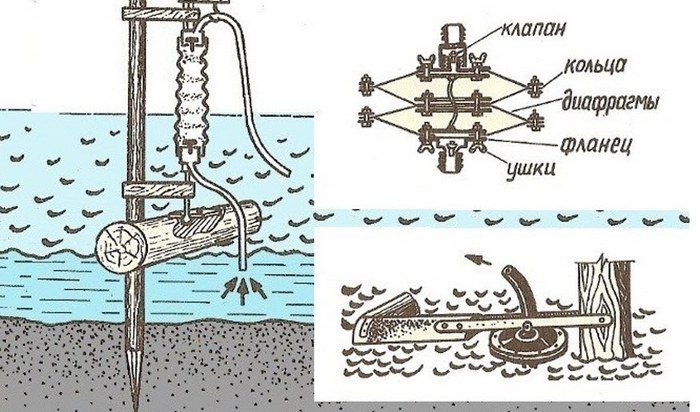
Hur man gör hemma något inte svårt? Ja, och användbart? Ditt hus måste hållas rent, och det är önskvärt att automatisera denna process. Naturligtvis är det svårt att skapa en fullvärdig rengöringsrobot, men den minsta designen som säkerställer att dammsugningen tas från golv i rummen är ganska kapabel. För att vara ärlig anses det att det fungerar på ett ställe och samtidigt tar bort små skräp i dislokationszonen. För att skapa en sådan struktur måste du ha följande material:
- Plastplåt.
- Tre små borstar som används för att rengöra skor eller golv.
- Två fans som kan tas från sina föråldrade datorer.
- 9V batteri och kontakt för den.
- Kopplar eller klämmor som kan snäppa på plats.
- Bultar och muttrar.
Borra hålen för penslarna på lika avstånd. Fäst dem. Det är önskvärt att alla penslar är belägna på samma avstånd från de andra och mitten av plattan. Med hjälp av bultar och muttrar bör en justeringsfäste fästas på var och en av dem, och de själva är fasta med hjälp. Justeringsreglagen ska ställas in i mittenpositionen. För rörelsen kommer att använda fans. Vi ansluter dem till batteriet och placerar dem parallellt så att de säkerställer rotationen av roboten i en cirkel. Denna design kommer att användas som en vibrationsmotor. Kasta terminaler och designen är klar att användas. Om under robotten kommer roboten att gå till sidan, arbeta med justeringsfästen. Den utformning som presenteras i artikeln kräver inte betydande finansiella utgifter eller tillgången på kunskaper och erfarenheter. När du skapar en robot används billigt material, som inte är tillgängliga för att få ett betydande problem. Om du vill komplicera designen och få den att flytta målriktigt, behöver du förbättringar i form av ytterligare motorer och mikrokontroller. Så här gör du en robot hemma. Och tänk bara hur mycket du kan förbättra här! Det bredaste fältet för designaktiviteter.
Nu minns få personer, tyvärr, att det var kemiska bröder år 2005 och de hade ett underbart klipp - Tro, där en robotarm skakade på videon runt hjälten.
Då hade jag en dröm. Otillfredsställande vid den tiden, eftersom jag inte hade den minsta idén om elektronik. Men jag ville tro - tro. 10 år har gått, och precis i går lyckades jag montera min egen robotmanipulator för första gången, lansera den i arbete, sedan bryta, reparera och lansera i jobbet igen, och hitta i processen vänner och få självförtroende.
Observera, under snitt spoilers!
Allt började med (Hej Master Keith, och tack för att du lade oss skriva på din blogg!), Som nästan omedelbart hittades och valdes efter artikeln om Habré. Webbplatsen säger att även ett 8-årigt barn kan montera en robot - varför är jag sämre? Jag försöker bara min hand på samma sätt.
Först var det paranoia
Som en sann paranoid kommer jag genast att uttrycka de bekymmer som jag ursprungligen hade angående designern. I min barndom var först i början goda sovjetiska designers, då kinesiska leksaker spridda i sina händer ... och då slutade barndomen: (Därför, från det som finns kvar i minnet om leksaker, var det:
- Kommer plasten att bryta och smula i dina händer?
- Detaljerna kommer inte att passa ihop?
- Kitet kommer inte alla detaljer?
- Kommer den sammansatta strukturen att vara bräcklig och kortlivad?
- Vissa delar måste slutföra filen
- Och delar av delarna kommer inte att vara i uppsättningen.
- Och en annan del kommer inte att fungera, det måste ändras
Detaljer om designern passar inte bara perfekt varandra, men också tänkte ut det ögonblicket som detaljer nästan omöjligt att förvirra. Sant med tysk grundlighet skaparna lägg av kuggar exakt så mycket som du behöverDärför är det oönskade att tappa kuggar längs golvet eller förvirra "vilken väg" när man monterar en robot.
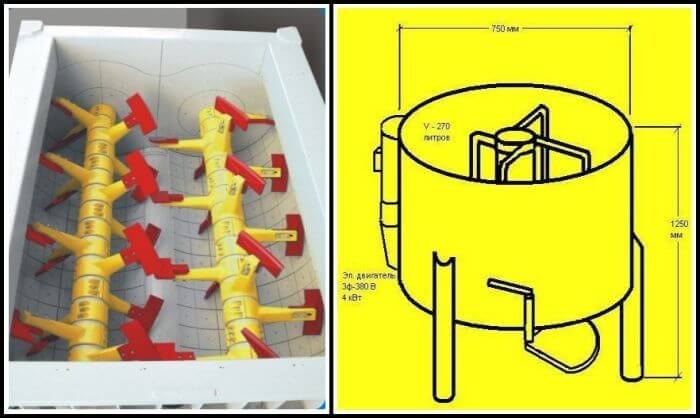
specifikationer:
längd:228 mm
höjd: 380 mm
bredd: 160 mm
Monteringsvikt: 658 gr.
Strömförsörjning: 4 typ D batterier
Vikt för lyftade föremål: upp till 100 gram
bakgrundsbelysning: 1 LED
Kontrolltyp: trådbunden fjärrkontroll
Beräknad byggtid: 6 timmar
rörelse: 5 kollektormotorer
Strukturellt skydd vid körning: spärr
rörlighet:
Fångningsmekanism: 0-1,77""
Handleden rörelse: inom 120 grader
Armbåge rörelse: inom 300 grader
Axelrörelse: inom 180 grader
Rotation på plattformen: inom 270 grader
Du behöver:
- långsträckta tänger (du kan inte utan dem)
- sidoklippare (kan bytas ut med papperskniv, sax)
- phillips skruvmejsel
- 4 typ D batterier
Det är viktigt! Om fina detaljer
Talar om "kuggar". Om du står inför ett liknande problem, och vet hur man gör montering ännu bekvämare - välkommen till kommentarerna. Hittills delar jag min erfarenhet.Lika i funktion men bultar och skruvar av olika längder framgår tydligt av instruktionerna, till exempel i mittbilden nedan ser vi bultarna P11 och P13. Eller kanske P14 - ja, det är, här igen, jag förvirrar dem igen. =)
Du kan skilja dem: det är skrivet i instruktionen, vilken är hur många millimeter. Men för det första kommer du inte att sitta med en tjocklek (speciellt om du är 8 år och du har helt enkelt inte det), och för det andra kan du bara skilja dem som ett resultat om du sätter dem ihop, vilket inte kan komma omedelbart att tänka på (jag kom inte, hehe).
Därför kommer jag att varna dig i förväg om du bestämmer dig för att montera denna eller en liknande robot själv, här är en ledtråd:
- eller i förväg titta på fästen;
- eller köp dig själv mindre skruvar, skruvar och bultar, för att inte bada.
Kasta i vilket fall som helst inte kasta någonting bort förrän du är färdig med monteringen. I bottenbilden i mitten, mellan de två delarna från robotens huvud - en liten ring som nästan flög i soporna tillsammans med andra "bitar". Och det är förresten hållaren till LED-ficklampan i "huvudet" på greppmekanismen.
Monteringsprocessen
Instruktioner bifogas roboten utan ytterligare ado-only bilder och tydligt katalogiserade och märkta detaljer.Delarna är lämpliga för att bita och behöver inte strippa, men jag gillade tanken att bearbeta varje detalj med en kartongkniv och en sax, även om det inte är nödvändigt.
Sammansättningen börjar med fyra av de fem motorerna som ingår i konstruktionen, vilket är ett riktigt nöje att samla: Jag älskar bara växlingsmekanismer.

Vi hittade motorerna snyggt packade och "fastnat" till varandra - var redo att svara på barnets fråga varför kollektormotorerna magnetiseras (du kan omedelbart i kommentarerna! :)
Det är viktigt: 3 av 5 motorhus behöver drockade nötter på sidorna - På dem i framtiden kommer vi att plantera kroppen när vi monterar händerna. Lateral nötter behövs inte bara i den lilla motorn, som kommer att fungera som grund för plattformen, men för att inte komma ihåg vilket fall som är bättre, dränka muttrarna i var och en av de fyra gula fallen samtidigt. Endast för denna operation behöver tänger, i framtiden kommer de inte behövas.

Efter ca 30-40 minuter var var och en av de 4 motorerna utrustade med växelmekanism och kropp. Allt kommer inte att bli mer komplicerat än i barndomen "Kinder Surprise" skulle bara mycket intressantare. Fråga om uppmärksamhet på bilden ovan: Tre av de fyra utgående växlarna är svarta och var är vit? Blå och svart tråd ska komma ut ur kroppen. Anvisningarna har allt, men jag tycker att det är värt att uppmärksamma det igen.

När du har alla motorer på händerna, förutom "huvudet", fortsätter du att montera plattformen på vilken vår robot kommer att stå. Det var vid denna tidpunkt jag förstod att jag var tvungen att agera mer med tankeväckande skruvar och skruvar: Som du kan se i bilden ovan hade jag inte tillräckligt med två skruvar för att fästa motorerna tillsammans med sido muttrar. djupet på den redan monterade plattformen. Jag var tvungen att improvisera.

När plattformen och huvuddelen av handen är monterade, kommer instruktionen att ge dig möjlighet att gå vidare till gripmekanismens samling, där den är full av små delar och rörliga delar - det mest intressanta!

Men jag måste säga att denna spoiler kommer att sluta och videon börjar, för jag var tvungen att gå på möte med min flickvän och roboten, som jag inte kunde slutföra, jag var tvungen att ta med mig.
Hur man blir själen i företaget med hjälp av en robot
Lätt! När vi fortsatte att bygga tillsammans blev det klart: montera roboten själv - väldigt mycket trevligt. Att arbeta på designen tillsammans är dubbelt trevlig. Därför kan jag säkert rekommendera den här uppsättningen för dem som inte vill sitta i ett kafé för tråkiga konversationer, men vill se vänner och ha det bra. Dessutom verkar det som att lagbyggnad med en sådan uppsättning - till exempel att bygga två lag, för fart - är nästan en win-win-möjlighet.Roboten kom till liv i våra händer så snart vi slutade församlingen. För att förmedla dig vår glädje kan jag tyvärr inte tala i ord, men jag tror att många här kommer att förstå mig. När den konstruktion som du själv monterat plötsligt börjar leva ett helt liv - det här är en spänning!
Vi insåg att vi var fruktansvärt hungriga och gick för att äta. Det var inte långt att gå, så vi bar roboten i våra händer. Och här väntade vi på en mer trevlig överraskning: roboten är inte bara fascinerande. Hon samlar också. Så snart vi satt ner vid ett bord, var vi omgivna av människor som ville lära känna roboten och samla in samma för sig själva. Mest av allt gillade gillarna att hälsa på roboten "för tentaklarna" eftersom det uppför sig som en levande och först och främst är det samma hand! I ett ord de grundläggande principerna för animatronik mästades av användarna intuitivt.. Så här såg det ut:
Felsökning
När jag kom hem var jag orolig överraskning, och det är bra att det hände före publiceringen av denna översyn, för nu diskuterar vi omedelbart felsökning.Beslutar att försöka flytta handen till maximal amplitud, lyckades uppnå en karakteristisk spricka och fel på funktionaliteten hos motormekanismen i armbågen. Först upprör jag mig: Nå, nu, en ny leksak, bara samlad - och fungerar inte längre.
Men då började det på mig: om du själv bara samlat in det, varför blev det? =) Jag vet väldigt bra kugghjulet i väskan och för att förstå om motorn själv bröt eller om inte det var helt enkelt fixat, kan du ta lasten ut ur brädet och se om klickningarna fortsätter.
Det var här jag lyckades känna mig själv härmed robotmästare!

Efter noggrann demontering av "armbågsförbandet" var det möjligt att bestämma att motorn går smidigt utan belastning. Fallet gick ut, en av skruvarna föll inuti (eftersom motorn var magnetiserad), och om vi fortsatte att fungera, skulle kugghjulen skadas - det karakteristiska "pulvret" av raderad plast hittades demonterad på dem.
Det är väldigt bekvämt att roboten inte behövde demonteras helt. Och det är väldigt cool att nedbrytningen berodde på den inte riktigt snygga sammansättningen på denna plats, och inte på grund av några fabriksproblem: de hittades inte alls i min uppsättning.
rådet Första gången efter montering, håll en skruvmejsel och en tang på hand - kan vara användbar.
Vad kan höjas genom denna uppsättning?
Självförtroende!Inte bara hade jag gemensamma teman för att kommunicera med fullständiga främlingar, men jag lyckades också att inte bara självständigt montera, men också fixa leksaken! Så kan jag vara säker: med min robot kommer allt alltid att vara bra. Och det här är en mycket trevlig känsla när det gäller favorit saker.
Vi lever i en värld där vi är fruktansvärt beroende av leverantörer, leverantörer, servicepersonal och tillgången på ledig tid och pengar. Om du knappast vet hur man gör någonting, måste du betala för allt, och troligtvis måste du betala för mycket. Förmågan att fixa leksaken själv, för att du vet hur varje knut är ordnad i den är ovärderlig. Låt barnet ha sådant självförtroende.
resultat
Vad du tyckte om:- Roboten monterad enligt instruktionerna krävde inte felsökning, det började genast
- Detaljer är nästan omöjliga att förvirra
- Strikt katalogisering och tillgänglighet
- Instruktioner för att inte läsa (endast bilder)
- Brist på signifikant bakslag och luckor i strukturerna
- Enkel montering
- Lätt att förebygga och reparera
- Sist men inte minst: du samlar din leksak själv, Filippinska barn arbetar inte för dig
- Fler fästelement, prozapas
- Delar och reservdelar till det, så att du kan ersätta om det behövs
- Fler robotar, olika och komplexa
- Idéer som kan förbättras \\ attach \\ remove - i ett ord slutar spelet inte på en montering! Jag vill verkligen att det ska fortsätta!
Att samla en robot från denna konstruktör är inte svårare än ett pussel eller "Kinder överraskning", bara resultatet är mycket större och orsakar en storm av känslor bland oss och de omkring oss. Bra set, tack
Relaterade artiklar