Hasznos erőforrások egy robot létrehozásához saját kezével. Készíts egy robotot otthon? Egyszerű! A vas-robotok ezt csinálják
Úgy döntöttem, hogy zökkenőmentesen megyek a dinamikus mozgó modellekhez. Ez egy kis, házi készítésű robot tervezése az IR-vezérlésen, egyszerű és hozzáférhető részekből összeállítva. A szív - két mikrokontroller. A távirányítóról történő átvitel biztosítja PIC12F675és a motorvezérlő fogadó része be van kapcsolva PIC12F629.
A robotnak a mikrokontrollerre vonatkozó rendszere

A digitális résznél minden zökkenőmentesen zajlott, a probléma csak a „meghajtórendszerben” volt - a kis hajtóművek, amelyeket nagyon nehéz otthon csinálni, ezért fejleszteni kellett az ötletet. ” vibro sokk". A mikromotorokat a BC337 erősítő tranzisztoros kapcsolóival vezéreljük, amelyek bármely más, 0,5 A kollektoráramú kis n-p-n tranzisztorral cserélhetők.

A méretek nagyon kicsinek bizonyultak - a képen egy érmével hasonlították össze, és még mindig egy matchbox közelében. A robot szemei nagy fényerejű LED-ekből állnak, amelyek kis elektrolit kondenzátorok esetén elakadtak.

Beszélj a cikkről SMALL MODEL ROBOT

Sokan közülünk, akik számítógépes technológiával találkoztak egy robot összeállítására. Ahhoz, hogy ez az eszköz otthon végezzen bizonyos feladatokat, hozzon létre sört. Egyszerre veszi a legösszetettebb robot létrehozását, de gyakran gyorsan eltörik az eredményeket. Nem hoztuk meg az első robotunkat, amely a zsetonok zúzódását tette. Ezért egy egyszerű, fokozatosan bonyolítja a fenevadat. Most elmondjuk, hogyan hozhat létre egy egyszerű robotot saját kezével, amely önállóan mozog a lakásában.
koncepció
Egy egyszerű feladatot állítottunk fel, hogy nem bonyolult robot legyen. Előretekintve azt mondom, hogy természetesen nem tizenöt perccel, hanem sokkal hosszabb ideig sikerült. De még egy este is megtehető.
Általában ezek a mesterségek az évek során készülnek. Az emberek több hónapig vásárolnak a megfelelő felszereléssel. De rögtön rájöttünk - ez nem a mi utunk! Ezért a designban olyan részleteket fogunk használni, amelyek könnyen megtalálhatók a kézben, vagy a régi technológiából kieshetnek. Végső megoldásként vásároljon filléreket bármely rádióüzletben vagy a piacon.
Egy másik ötlet az volt, hogy kézművességünket minél olcsóbbá tegyük. Egy ilyen robot 800 és 1500 rubel értékű elektronikus áruházban van! Mit árul el részek formájában, és még meg kell gyűjtenie, és nem azt a tényt, hogy ezután is működik. Az ilyen készletek gyártói gyakran elfelejtik elhelyezni néhány alkatrészt, és ez az - a robot elvesztette a pénzt! Miért van szükségünk ilyen boldogságra? Robotunk nem lehet drágább, mint 100-150 rubel, beleértve a motorokat és az elemeket is. Ugyanakkor, ha a motorokat egy régi gyermekkocsiból választja ki, akkor az ára általában 20-30 rubel lesz! Úgy érzi, milyen megtakarítás ér el, miközben nagyszerű elvtárs.
A következő rész az volt, amit a jóképű férfi csinálna. Úgy döntöttünk, hogy egy robotot készítünk, amely fényforrásokat keres. Ha a fényforrás megfordul, a gépünk utána vezet. Ezt a koncepciót „a robot élni akarja”. Lehetséges, hogy ki kell cserélnie az elemeket napelemekkel, majd meg fogja keresni a fényt.
Szükséges alkatrészek és eszközök
Mit kell a gyermekünk gyártásához? Az improvizált eszközök fogalma óta szükségünk van egy áramköri lapra, vagy akár a szokásos vastag kartonra is. A kartondobozban awl-t használhat, hogy lyukakat készítsen az összes részlet rögzítéséhez. A telepítőt fogjuk használni, mert kéznél volt, és a nap folyamán nem találsz kartonot a házamban. Ez lesz az a alváz, amelyen a robot többi részét szereljük fel, rögzítjük a motorokat és az érzékelőket. A hajtóerőként három vagy öt voltos motorokat fogunk használni, amelyeket ki lehet venni a régi írógépből. A kerekek műanyag palack kupakokból készülnek, például a Coca-Cola-ból.

Érzékelőként három voltos fototranzisztorokat vagy fotodiodákat használnak. Ezek egy régi optomechanikus egérből is kiválaszthatók. Infravörös érzékelők vannak benne (esetünkben feketeek voltak). Ott vannak párosítva, azaz két fotocella egy üvegben. A teszterrel semmi sem akadályozza meg, hogy kiderítse, melyik láb van. A vezérlőelem a 816G hazai tranzisztor lesz. Három ujj típusú akkumulátort használunk áramforrásként egymáshoz forrasztva. Vagy a régi írógép elemtartóját is elvehetjük, ahogyan mi is. A telepítés szükséges vezetékek. Ebből a célból ideális csavart érpárok, amelyek bármelyik önbecslő hacker házában halomnak kell lenniük. Minden alkatrész rögzítéséhez kényelmes olvadék ragasztó használata. Ez a gyönyörű találmány gyorsan és gyorsan elolvad, és lehetővé teszi, hogy gyorsan dolgozzon vele és szerelje fel az egyszerű elemeket. A ragasztás ideális az ilyen mesterségek számára, és többször is használtam a cikkemben. Szükségünk van egy kemény huzalra is, mert ez lesz a szokásos papírkapcsáról.
Felszereljük a rendszert

Tehát megkaptuk az összes részletet, és az asztalra helyeztük őket. A forrasztópáka már meggyullad a gyantával, és megdörzsölte a kezét, vágyat összeszerelésre, de kezdjük el. Vegyünk egy darab montázsot és vágjuk le a jövő robotjának méretére. PCB vágásához fém ollóval. Körülbelül 4-5 cm oldalú négyzetet állítottunk elő, melynek lényege, hogy a gyenge séma beleillik, két elem a tápegység és az első kerék hardveréhez. Annak érdekében, hogy a tábla ne legyen bozontos és sima, feldolgozhatja azt egy fájlban, és eltávolíthatja az éles éleket is. A következő lépés az érzékelők tömítése. A fototranzisztorok és fotodiodek plusz és mínusz, más szóval anód és katód. Figyelembe kell venni a beilleszkedés polaritását, amelyet egy egyszerű teszttel könnyen meg lehet határozni. Ha hibázik, semmi sem ég, de a robot nem fog vezetni. Az érzékelőket az egyik oldalon az áramköri lapok sarkaihoz forrasztják, úgyhogy oldalra nézve. Nem szabad teljes mértékben lezárni a táblára, hanem másfél centiméternyi következtetést kell hagyniuk úgy, hogy könnyedén lehajthassanak bármely irányba - a jövőben szükségünk lesz erre a robot felállításakor. Ezek lesznek a szemünk, az alvázunk ugyanazon oldalán kell lenniük, ami a jövőben a robot eleje lesz. Rögtön megjegyezzük, hogy két szabályozó áramkört gyűjtünk: egyet a jobb és a második vezérlésére a bal oldali motoroknál.

Egy kicsit távolabb az alváz elülső szélétől, az érzékelőink mellett, meg kell forrasztani a tranzisztorokat. A további séma tömítése és összeszerelése érdekében mindkét tranzisztort forrasztottuk a jobb oldali kerék irányába. Közvetlenül meg kell jegyezni a tranzisztor lábainak elhelyezkedését. Ha a tranzisztort a kezében tartja, és a fémtámaszot maga felé fordítja, és az erdőre (mint a mese), és a lábak lefelé mutatnak, akkor balról jobbra a lábak lesznek: bázis, gyűjtő és sugárzó. Ha megnézzük azt a diagramot, ahol a tranzisztorunk látható, akkor a bázis egy pálcára merőleges pálca lesz egy körben, egy emitter egy pálca egy nyíllal, egy kollektor ugyanaz a pálca, de nyíl nélkül. Itt minden világosnak tűnik. Készítse elő az elemeket, és folytassa az elektromos áramkör azonnali összeállításához. Kezdetben csak három ujj elemet vettünk, és egymás után forrasztottuk. Azonnal behelyezheti őket egy speciális elemtartóba, amely - amint azt már említettük - ki van húzva a régi gyermekkocsiból. Most forrasztjuk a vezetékeket az akkumulátorokhoz és határozzuk meg a fórumon két kulcsfontosságú pontot, ahol az összes vezeték összehangolódik. Ez plusz és mínusz lesz. Egyszerűsítettük - megfordítottuk a csavart érpárot a tábla szélein, forrasztottuk a végeket a tranzisztorokhoz és fényérzékelőkhöz, csavart hurkot készítettünk, és ott forrasztottuk az elemeket. Talán nem a legjobb megoldás, de a legkényelmesebb. Nos, most előkészítjük a vezetékeket, és folytatjuk a villanyszerelők összeszerelését. Az elektromos áramkörben az akkumulátor pozitív pólusától a negatív érintkezőhöz megyünk. Vegyünk egy darab csavart érpárt, és elkezdünk - forrasztani a két fényérzékelő pozitív érintkezését az akkumulátorok pluszjával, ugyanabban a helyen forrasztjuk a tranzisztorok kibocsátóit. Forgassa a fotocella második lábát egy kis huzallal a tranzisztor aljához. A fennmaradó, utolsó lábak transyuka forrasztják a motort. A motorok második érintkezője a kapcsolón keresztül forrasztható az akkumulátorhoz.
De mint igazi Jedi, úgy döntöttünk, hogy a huzal forrasztásával és forrasztásával robotunkat bekapcsoljuk, mert a tartályomban nem volt megfelelő méretű.
Villanyszerelő hibakeresés
Mindent, összeállítottuk az elektromos részt, most elkezdjük tesztelni az áramkört. Kapcsolja be a rendszerünket, és vigye a megvilágított asztali lámpába. Forduljon meg egy vagy másik fénysorompót. És nézd meg, mi történik. Ha a motorok a világítástól függően különböző fordulatszámon forognak, akkor minden rendben van. Ha nem, keresse meg az összeszerelésben levő zsákokat. Az elektronika a kapcsolatok tudománya, ami azt jelenti, hogy ha valami nem működik, akkor valahol nincs kapcsolat. Fontos pont: a bal oldali kerékért felelős a jobb fotóérzékelő, a jobb oldali bal oldali kerékérzékelő. Most úgy tesszük, hogy melyik irányban forog a jobb és a bal motor. Mindketten előre kell fordulniuk. Ha ez nem történik meg, meg kell változtatnia a motor bekapcsolásának polaritását, amely rossz irányban forog, egyszerűen úgy, hogy a huzalokat a motor kivezetéseire fordítva forrasztja. Ismét megvizsgáljuk a motorok elhelyezkedését az alvázon, és ellenőrizzük a mozgás irányát abban az irányban, ahol az érzékelőink telepítve vannak. Ha minden rendben van, akkor tovább megyünk. Mindenesetre javítható, még akkor is, ha minden végül összegyűlt.
Eszköz létrehozása
A fárasztó elektromos alkatrészekkel rájöttünk, most lépjünk a mechanikához. A kupakok kerekeit műanyag palackokból gyártjuk. Az első kerék gyártásához vegye be a két fedelet, és ragassza össze őket.

Az üreges rész kerülete körül ragasztottuk a kerék jobb stabilitását. Továbbá, pontosan a fedél közepén fúrunk egy lyukat az első és a második fedélen. A fúráshoz és mindenféle otthoni kézműves munkához nagyon kényelmes a Dremel, egy kis fúvóka, amely különböző fúvókákkal, marással, vágással és sok mással is használható. Nagyon kényelmesen használható egy milliméteres lyukak fúrásához, ahol még egy rendszeres fúró sem tud megbirkózni.

Miután fúrjuk a sapkákat, behelyezünk egy előre kinyitott klipet a lyukba.

A „P” betű alakját hajtsa végre, ahol a kerék a betű felső sávján lóg.

Most rögzítjük ezt a klipet fényképérzékelők között, autóink előtt. A klip kényelmes, mert könnyen beállíthatja az első kerék magasságát, és ezt a beállítást később kezeljük.
A meghajtó kerekekhez fordulunk. A borítókból is azokat fogjuk tenni. Hasonlóképpen, szigorúan fúrjuk az egyes kerekeket a központban. A legjobb, ha fúrjuk a motor tengelyének méretét, és ideális esetben egy milliméter kisebb részét, hogy a tengely be legyen helyezve, de nehezen. Mindkét kereket a motor tengelyén ruházzuk fel, és úgy, hogy ne ugorjanak le, akkor forró olvadékkal rögzítjük őket.


Fontos, hogy ezt ne csak úgy végezze el, hogy a kerekek ne mozogjanak el, és ne forduljanak el a rögzítők helyett.
A legfontosabb rész az elektromos motorok szerelése. Az elektronika többi részéhez viszonyítva, az áramköri lap másik oldalára helyeztük őket. Emlékeztetni kell arra, hogy a vezérelt motor a vezérlési fotórendszerével ellentétes. Ez úgy történik, hogy a robot bekapcsolja a fényt. Jobb fényérzékelő, bal motor és fordítva. Először a csavart érpárral fogjuk meg őket, a menetes nyílásokon átmenni, és felülről csavart.

Áramellátást biztosítunk, és nézzük, hol forognak a motorok. A sötét szobában a motor nem forog, kívánatos a lámpa irányítása. Ellenőrizze, hogy az összes motor működik-e. Forgatjuk a robotot, és figyeljük, hogy a motorok hogyan változtatják meg a forgási sebességet a világítástól függően. Fordítsuk a jobb fényérzékelőt, és a bal oldali motornak finoman kell forognia, a másik pedig lelassul. Végül ellenőrizzük a kerekek forgásirányát, hogy a robot tovább haladjon. Ha minden működik, amint azt leírtuk, akkor a csúszkákat forró olvadékkal rögzítheti.

Megpróbáljuk a kerekeiket azonos tengelyre állítani. Mind - rögzítjük az elemeket az alváz tetején, és a robothoz mentünk a beállításokra és a játékokra.
Buktatók és hangolás
Váratlan volt az első csapás a hajónkban. Amikor összeállítjuk az egész rendszert és a technikai részt, minden motor tökéletesen reagált a fényre, és minden úgy tűnt, hogy nagyszerű. De amikor a robotot a padlóra tesszük - nem ment velünk. Kiderült, hogy a motorok teljesítménye egyszerűen nem elég. Szükségem volt sürgősen raskruchivat bébi gépre, hogy onnan erősebb motorokat kapjak. Egyébként, ha a motorokat a játékból veszi, akkor biztosan nem fog eltévedni a hatalmával, mivel úgy tervezték, hogy sok elemet hordozzon. Amikor kitaláltuk a motorokat, továbbléptünk a kozmetikai megjelenéshez. Először meg kell gyűjtenie a vezetékek szakállát, amit a padlóra húzunk, és erősen erősítjük őket a karosszériára meleg ragasztóval.

Ha a robot valahol húzza a hasát, akkor az elülső házat a rögzítőhuzal hajlításával felemelheti. A legfontosabb fényképérzékelők. A legjobb, ha harminc fokos oldalra hajlítják őket a főételtől. Aztán megragadja a fényforrásokat, és megy hozzájuk. A kívánt hajlítási szöget kísérleti úton kell kiválasztani. Minden, egy asztali lámpával, a robotot a padlóra helyezzük, kapcsoljuk be, és elkezdjük ellenőrizni és örülni arról, hogy a gyermek egyértelműen követi a fényforrást, és hogyan találja meg tévesen.
fejlesztések
A tökéletességnek nincs korlátja, és a végtelenhez funkciókat is hozzáadhat a robotunkhoz. Gondolatok voltak még a vezérlő elhelyezésére is, de a gyártás költsége és összetettsége többször is növekedni fog, és ez nem a mi módszerünk.
Az első javítás egy olyan robot létrehozása, amely egy adott útvonal mentén utazik. Itt minden egyszerű, egy fekete csík kinyomtatva van a nyomtatóra, vagy hasonlóan egy fekete állandó jelölővel van rajzolva a rajzpapírlapon. A fő dolog az, hogy a szalag kicsit szűkebb volt, mint a lezárt fotóérzékelők szélessége. Leeresztjük a fotócellákat úgy, hogy a padlóra nézzenek. Mindegyik szemünkhöz szuper fényes LED-et szerelünk fel, 470 Ohm ellenállással. A LED önálló ellenállása közvetlenül az akkumulátorra forrasztódik. Az ötlet egyszerű, egy fehér papírlapról a fény tökéletesen tükröződik, az érzékelőhöz ér, és a robot egyenesen megy. Amint a fénysugár eléri a sötét csíkot, a fény szinte nem kerül a fénysorompóra (a fekete papír tökéletesen elnyeli a fényt), ezért az egyik motor lassabban forog. Egy másik motor rögtön megfordítja a robotot, kiegyenlítve a pályát. Ennek eredményeként a robot egy fekete csíkra tekercs, mintha síneken lenne. Ilyen csíkot rajzolhat a fehér padlóra, és küldheti a robotot a konyhába egy sörért a számítógépből.
A második ötlet az, hogy még két tranzisztort és két fényérzékelőt bonyolítson, és a robotot ne csak elölről, hanem minden oldalról keresse meg, és amint megtalálták, rohant rá. Minden csak attól függ, hogy melyik oldalon jelenik meg a fényforrás: ha az elöl van, akkor előre halad, és ha hátul van, akkor visszafelé gördül. Még ebben az esetben is egyszerűsíthető az összeszerelés, használja az LM293D chipet, de körülbelül száz rubelt fizet. De ennek segítségével könnyedén beállíthatja a kerekek forgásirányának differenciálját, vagy egyszerűen a robot mozgásának irányát: előre és hátra.
Az utolsó dolog, amit megtehetsz, az, hogy teljesen eltávolítsuk a tartósan ülő elemeket, és egy napelembe helyezzük, amit most már megvásárolhat a mobiltelefon-kiegészítők áruházában (vagy a telefonos kapcsolatban). Annak megakadályozása érdekében, hogy a robot teljes mértékben elveszítse kapacitását ebben az üzemmódban, ha véletlenül az árnyékba esik, a napelemekkel párhuzamosan csatlakoztatható - egy nagyon nagy kapacitású elektrolit kondenzátor (több ezer mikrofarad). Mivel a feszültség, amelyen van, nem haladja meg az öt voltot, akkor a kondenzátort 6,3 voltra lehet tervezni. Az ilyen kapacitás és az ilyen feszültség eléggé miniatűr lesz. A kondenzátorok megvásárolhatók, vagy a régi tápegységekből kieshetnek.
A fennmaradó lehetséges változatok, úgy gondoljuk, magadra gondolsz. Ha valami érdekes - írja be.
megállapítások
Szóval megismertük a legnagyobb tudományt, a haladás motorját - kibernetikát. A múlt század hetvenes éveiben nagyon népszerű volt ilyen robotok kialakítása. Meg kell jegyezni, hogy létrehozásunkban az analóg számítástechnika kezdetét alkalmaztuk, amely a digitális technológia megjelenésével halt meg. De ahogy e cikkben bemutattam - nem minden elveszett. Remélem, nem fogunk ilyen egyszerű robot kialakításán maradni, de új és új terveket fogunk találni, és érdekes kézművességeinkkel meglepni fog minket. Sok szerencsét!
Biztos, hogy a robotokról készült filmek után gyakran szerette volna megépíteni elvtársát, de nem tudta, hol kezdje. Természetesen nem tudsz kétlábú terminátort építeni, de erre sem törekszünk. Bárki, aki tudja, hogyan kell helyesen tartani a forrasztópázt a kezében, egy egyszerű robotot tud összeállítani, és nem igényel mély tudást, bár nem zavarja őket. Az amatőr robotika nem sokban különbözik az áramkör tervezésétől, csak sokkal érdekesebb, mert vannak olyan területek is, mint a mechanika és a programozás. Minden alkatrész könnyen hozzáférhető és költséges. Tehát a fejlődés nem áll meg, és mi hasznára fogjuk használni.
bevezetés
Szóval Mi a robot? A legtöbb esetben ez egy automatikus eszköz, amely reagál a környezet bármely tevékenységére. A robotokat emberek vezérelhetik, vagy előre programozott műveleteket végezhetnek. A robot jellemzően számos érzékelővel rendelkezik (távolság, forgásszög, gyorsulás), videokamerák, manipulátorok. A robot elektronikus része egy mikrokontrollerből (MK) áll, amely egy mikrokapcsoló, amelyben a processzor, az óra generátor, a különféle perifériák, a működési és állandó memória kerül. A világban számos különböző mikrokontroller van a különböző alkalmazásokhoz, és ezek alapján erős robotokat lehet összeállítani. Az amatőr épületek esetében az AVR mikrokontrollereket széles körben használják. Ezek messze a leginkább hozzáférhetőek, és sok példa megtalálható az interneten ezen MC-ek alapján. Ahhoz, hogy mikrokontrollerekkel dolgozzon, be kell tudnia programozni az összeszerelőben vagy a C-ben, és alapvető ismeretekkel kell rendelkeznie a digitális és analóg elektronikában. Projektünkben C.-t fogunk használni. Az MK programozása nem sokban különbözik a számítógép programozásától, a nyelv szintaxisa ugyanaz, a legtöbb funkció szinte azonos, és az újok meglehetősen könnyen megtanulhatók és kényelmesek.Amire szükségünk van
Először is, a robotunk képes lesz egyszerűen az akadályok körül mozogni, vagyis megismételni a legtöbb állat szokásos viselkedését a természetben. Minden, amire szükségünk van egy ilyen robot építéséhez, megtalálható a rádióüzletekben. Döntse el, hogyan mozog a robot. Úgy gondolom, hogy a tartályokban használt legeredményesebb pályák a legkényelmesebb megoldás, mivel a pályák nagyobb átjárhatósággal rendelkeznek, mint az autó kerekei, és könnyebben kezelhetőek (eléggé elfordul, hogy a pályákat különböző irányokba forgassa). Ezért szükség lesz egy játéktartályra, amelyben a pályák egymástól függetlenül forognak, és bármilyen áruházban elfogadható áron vásárolhatók. Ebből a tartályból csak egy, a sebességváltóval ellátott sínekkel és motorral rendelkező platformra van szükség, a többit biztonságosan ki lehet csavarni és kidobni. Szükségünk van egy mikrovezérlőre is, a választásom az ATmega16-ra esett - elegendő port található az érzékelők és a perifériák csatlakoztatásához, és általában elég kényelmes. Meg kell vásárolni néhány rádiós alkatrészt, egy forrasztópáka, egy multimétert.Az MK-val fizetünk

Robot elrendezés
Esetünkben a mikrokontroller elvégzi az agy funkcióit, de nem fogjuk elkezdeni vele, hanem a robot agyának tápellátásával. A megfelelő táplálkozás az egészség garanciája, ezért elkezdjük a robotunk megfelelő takarmányozását, mert ez általában olyan hely, ahol a kezdő robot építői tévednek. És ahhoz, hogy robotunk normálisan működjön, feszültségstabilizátort kell használnia. Én inkább az L7805-ös chipet részesítem előnyben - úgy tervezték, hogy stabil kimeneti feszültséget állítson elő a kimeneten. De mivel a feszültségesés ezen a chipen körülbelül 2,5V, legalább 7,5V-ra kell szolgálni. Ezzel a stabilizátorral együtt elektrolit kondenzátorokat használnak a feszültség hullámzatok kiegyenlítésére, és egy diódát kell beépíteni az áramkörbe, hogy megvédje a polaritás megfordulását.
Most megtehetjük a mikrokontrollert. Az MK-DIP esetében (ez kényelmesebb forrasztani) és negyven következtetést tartalmaz. Van egy ADC, PWM, USART és sok más dolog, amit most nem fogunk használni. Tekintsünk néhány fontos csomópontot. A RESET csapot (az MK 9. lábát) az R1 ellenállás húzza fel az áramforrás „pluszjába” - ezt meg kell tenni! Ellenkező esetben az MC-t véletlenül el lehet hagyni, vagy egyszerűen egyszerűbben. Kívánatos mérőeszköz, de nem kötelező, hogy csatlakoztassa a RESET-et a C1 kerámia kondenzátoron a „talajhoz”. Az ábrán az elektrolit 1000 mikroszámlapon is látható, a motorok feszültségcsökkenéséből mentve, ami szintén pozitív hatással lesz a mikrokontroller működésére. Az X1 kvarc rezonátort és a C2, C3 kondenzátorokat az XTAL1 és XTAL2 kapcsokhoz a lehető legközelebb kell elhelyezni.
Nem fogok beszélni arról, hogyan kell az MK-t villogni, mivel az internetről olvashat. A programot C-ben írjuk, és a programozási környezetnek a CodeVisionAVR-t választottam. Ez egy meglehetősen kényelmes környezet, és hasznos a kezdőknek, mert beépített varázslóval rendelkezik a kód létrehozásához.

A robot díja
Motorvezérlés
Robotunk egyaránt fontos alkotóeleme a motorvezérlő, ami megkönnyíti számunkra, hogy kezeljük. Soha és semmiképpen sem csatlakoztathatja a motort közvetlenül az MK-hoz! Általánosságban elmondható, hogy az erőteljes terheléseket nem lehet közvetlenül a mikrokontrollerről vezérelni, különben éget. Használjon kulcs tranzisztorokat. Esetünkben van egy speciális chip - L293D. Ilyen egyszerű projektekben mindig próbálja meg használni ezt a chipet a „D” indexgel, mivel beépített diódákkal rendelkezik a túlterhelés elleni védelem érdekében. Ez a mikroáramkör nagyon könnyen kezelhető és csak rádióüzletekben kapható. Két DIP és SOIC csomagban található. A fedélzeti telepítés kényelme miatt a DIP csomagot fogjuk használni. Az L293D külön tápegységgel rendelkezik a motorokkal és a logikával. Ezért a mikroáramkört a stabilizátor (VSS bemenet) és a motorok közvetlenül az akkumulátorokból (VS bemenet) tápláljuk. Az L293D egy csatornánként 600 mA terhelésnek ellenáll, és két csatornával rendelkezik, azaz két motor csatlakoztatható egy mikrovezetékhez. De annak érdekében, hogy biztonságban legyünk, egyesítjük a csatornákat, majd minden egyes motorhoz egy mikró lesz. Ebből következik, hogy az L293D képes lesz ellenállni az 1.2 A-nak. Ennek eléréséhez szükséges a mikro lábának kombinálása, amint az az ábrán látható. A mikroáramkör a következő módon működik: ha az IN1 és IN2 logikai „0” -ot, az IN3 és IN4 logikai egységet alkalmazzuk, a motor egy irányban forog, és ha a jeleket invertáljuk, logikai nullát alkalmazunk, majd a motor a másik irányban elkezd forogni. Az EN1 és az EN2 következtetései az egyes csatornák engedélyezéséért felelősek. Csatlakoztatjuk őket és a stabilizátor „plusz” tápellátásához csatlakoztatjuk őket. Mivel a mikroáramkör működése közben felmelegszik, és a radiátorok telepítése problémás az ilyen típusú esetekben, a hőt a GND lábak biztosítják - a legjobban nem érintkeznek széles érintkezési területen. Ez az első alkalom, hogy tudni kell a motorok vezetőiről.Akadályérzékelők
Annak érdekében, hogy robotunk navigálhasson és ne érjen el mindent, két infravörös érzékelőt telepítünk rajta. A legegyszerűbb érzékelő egy IR diódából áll, amely az infravörös spektrumban és egy fototranzisztorban bocsát ki, amely egy IR diódából vett jelet kap. Ez az alapelv: ha az érzékelő előtt nincs akadály, az infravörös sugarak nem esnek a fototranzisztorra, és nem nyílik meg. Ha van egy akadály az érzékelő előtt, akkor a sugárzások tükröződnek és leesnek a tranzisztorra - kinyílik, és az áram elindul. Az ilyen érzékelők hátránya, hogy különböző módon reagálhatnak a különböző felületekre, és nem védve vannak az interferenciától - az érzékelőt egyébként más eszközök külső jelei is kiválthatják. Megvédhet a jel modulációtól, de egyelőre ez nem fog zavarni. Először is, ez elég.
A robotom első érzékelői változata
Robot firmware
A robot újraélesztéséhez meg kell írnia a firmware-t, vagyis egy olyan programot, amely az érzékelőkről leolvasásokat vesz igénybe és vezérli a motorokat. A program a legegyszerűbb, nem tartalmaz komplex struktúrákat, és mindenki számára világos lesz. A következő két sor tartalmazza a mikrokontroller fejlécfájljait és a késleltetést generáló parancsokat: #include
#include
A következő sorok feltételesek, mert a PORTC értékek attól függnek, hogy hogyan csatlakoztatta a motorok vezetőjét a mikrokontrolleréhez:
PORTC.0 = 1;
PORTC.1 = 0;
PORTC.2 = 1;
PORTC.3 = 0;
A 0xFF érték azt jelenti, hogy a kimenet napló lesz. "1" és 0x00 - napló. "0".
A következő konstrukcióval ellenőrizzük, hogy van-e akadály a robot előtt, és hogy melyik oldalon van:
Ha (! (PINB és (1<
...
}
Ha a fototranzisztor a fényt az infravörös diódából kapja, akkor a naplót a mikrokontroller lábánál állítják be. A „0” és a robot hátrafelé mozog, hogy távolodjon az akadálytól, majd megfordul, hogy ne jusson újra akadályba, majd újra elinduljon. Mivel két érzékelőnk van, kétszer ellenőrzünk egy akadályt - jobbra és balra, ezért kideríthetjük, melyik oldalon az akadály. A „delay_ms (1000)” parancs azt jelzi, hogy egy másodperc eltelt a következő parancs végrehajtása előtt.
következtetés
A legtöbb olyan szempontot lefedtem, amely segít az első robotod összeállításában. De ez a robot nem ér véget. Ha összeszereled ezt a robotot, akkor rengeteg lehetőséged lesz annak kibővítésére. Javíthatja a robot algoritmusát, például azt, hogy mit tegyen, ha az akadály nem egy oldalról van, hanem közvetlenül a robot előtt. Nem sérti meg a kódoló telepítését is - ez egy egyszerű eszköz, amely segít pontosan megtalálni és ismerni robotjának helyét az űrben. Az egyértelműség érdekében telepíthet színes vagy monokróm képernyőt, amely hasznos információkat jelenít meg - az akkumulátor töltöttségi szintje, az akadályok távolsága, különböző hibakeresési információk. Az érzékelők javítása sem sérül - TSOP telepítése (ezek olyan infravörös vevők, amelyek csak bizonyos frekvencián érzékelik a jelet) a hagyományos fototranzisztorok helyett. Az infravörös érzékelők mellett ultrahang-érzékelők is léteznek, drágábbak, és nem is vannak hátrányaik, de a közelmúltban egyre népszerűbbek a robotgyártók körében. Annak érdekében, hogy a robot reagáljon a hangra, nagyon jó lenne mikrofonokat telepíteni az erősítővel. De az igazán érdekes, azt hiszem, a kamera telepítése és a rajta alapuló számítógépes látás programozása. Van egy speciális OpenCV könyvtár, amellyel programozhatja az arcok, a színes jelzők mozgásainak felismerését és számos érdekes dolgot. Mindent a képzeletedtől és a készségektől függ.Az összetevők listája:
- ATmega16 a DIP-40 csomagban\u003e
- L7805 TO-220 csomagban
- L293D DIP-16 csomagban x2 db.
- 0,25 W ellenállások névleges értékekkel: 10 kΩ x1 db, 220 Ohm x4 db.
- kerámia kondenzátorok: 0,1 mikroszálas, 1 mikroszálas, 22 pF
- elektrolit kondenzátorok: 1000 mikroszálas x 16 V, 220 mikroszálas x 16V x2 db.
- 1N4001 vagy 1N4004 dióda
- 16 MHz-es kristály
- IR-diódák: bármelyik alkalmas két darab mennyiségben.
- fototranzisztorok is, bármi is, de csak az infravörös sugarak hullámhosszára reagálnak
Firmware-kód:
/*****************************************************Firmware a robot számára
MK típus: ATmega16
Óra gyakorisága: 16,000000 MHz
Ha a kvarcfrekvencia eltérő, meg kell adnia ezt a környezetbeállításokban:
Projekt -\u003e Konfigurálás -\u003e C fordító fül
*****************************************************/
#include
#include
Void main (void)
{
// Portok beállítása bejegyzéshez
// Ezeken a portokon keresztül szenzorokból vettünk jeleket
DDRB = 0x00;
// Kapcsolja be a pull-up ellenállásokat
PORTB = 0xFF;
// Állítsa be a portokat a kilépéshez
// Ezeken a portokon keresztül vezéreljük a motorokat
DDRC = 0xFF;
// Fő programhurok. Itt olvashatjuk az érzékelők értékeit.
// és motorok hajtják
míg (1)
{
// Előre haladva
PORTC.0 = 1;
PORTC.1 = 0;
PORTC.2 = 1;
PORTC.3 = 0;
ha (! (PINB és (1<
// Menj vissza 1 másodpercre
PORTC.0 = 0;
PORTC.1 = 1;
PORTC.2 = 0;
PORTC.3 = 1;
delay_ms (1000);
// csomagolás
PORTC.0 = 1;
PORTC.1 = 0;
PORTC.2 = 0;
PORTC.3 = 1;
delay_ms (1000);
}
ha (! (PINB és (1<
// Menj vissza 1 másodpercre
PORTC.0 = 0;
PORTC.1 = 1;
PORTC.2 = 0;
PORTC.3 = 1;
delay_ms (1000);
// csomagolás
PORTC.0 = 0;
PORTC.1 = 1;
PORTC.2 = 1;
PORTC.3 = 0;
delay_ms (1000);
}
};
}
A munkámról
Jelenleg a robotom majdnem teljes.
Vezeték nélküli kamerával, távolságérzékelővel (mind a kamera, mind az érzékelő a forgótoronynak van felszerelve), akadályérzékelővel, kódolóval, a konzolból érkező jelek vevőjével és egy RS-232 interfésszel rendelkezik a számítógéphez való csatlakozáshoz. Két üzemmódban működik: autonóm és kézi (vezérlőjeleket fogad a távirányítóról), a kamerát távolról is be lehet kapcsolni, vagy maga a robot is, hogy megtakarítsa az akkumulátort. Írok firmware-t a lakás védelme érdekében (képátvitel számítógépre, mozgásérzékelés, körutazás a helyiség körül).
Ha kívánja, közzéteszem a videót:
UPD. Újratöltöttem a képeket, és kis javításokat végeztem a szövegben.
Hogyan készítsünk otthon egy robotot, hogy minden dolgozhasson? Egy egyszerű és fokozatosan bonyolult! Az otthoni robotok létrehozásának utasításai szó szerint elárasztották az internetet. A cikk szerzője nem marad el ebből. Általában ez a folyamat három részre osztható: elméleti, előkészítő és közvetlen összeállítás. A cikk keretein belül mindegyiket figyelembe veszik, és a tisztítószer fejlesztésének általános rendszerét ismertetjük.
Robot létrehozása otthon
A semmiből való fejlődéshez szükség van az áram, a feszültség, a különböző elemek, mint például a triggerek, kondenzátorok, ellenállások, tranzisztorok működésére. Meg kell tanulnia, hogyan kell mindezt forrasztani az ábrákon, és használja az összekötő vezetékeket. Szükséges a cselekvések mozgásának és végrehajtásának minden aspektusának kidolgozása, a cél eléréséhez szükséges intézkedések maximális részletességének elérése. És ez a tudás akkor szükséges, ha tényleg érdekli, hogy hogyan készítsünk egy robotot otthon, és ne csak tétlen kíváncsiságot.
Előkészítő folyamatok

Mielőtt elkezdené kitalálni, hogyan készítsen otthon egy robotot, gondoskodnia kell a körülményektől, amelyekben összeáll. Először elő kell készítenie egy munkahelyet, ahol a kívánt eszközt hozza létre. Szükséges, hogy a szerkezetet és annak alkatrészeit valahol elhelyezzük. Figyelembe kell venni, és a forrasztópáka, a gyanta és a forrasztás kényelmes elhelyezésének kérdését. A munkahelynek a lehető legoptimálisabbnak kell lennie, hogy kényelmesebb legyen a struktúrával való kölcsönhatás során.
gyülekezés

Gondoljunk arra a szerkezet „gerincére”, amelyre minden épül. Általában egy rész van kiválasztva, és a többiek forrasztva vannak. A forrasztás minőségéről beszélve meg kell mondani, hogy meg kell tisztítani azokat a helyeket, ahol tartják. Az alkalmazott vezetékek és lábak vastagságától függően szükséges, hogy elegendő mennyiségű forrasztást vegyen fel, hogy az elemek ne essenek le működés közben. A jelátvitel folyamatának leegyszerűsítése és az áramkör lehetőségének megakadályozása érdekében törölheti azt, majd az összes szükséges elemet rá kell helyezni, a kapott struktúra egy áramforráshoz csatlakozik, és ha szükséges, az eszköz finomítva van.
Egyszerű robot

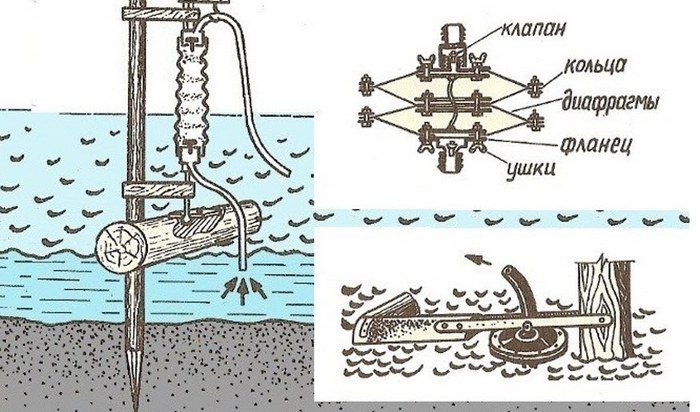
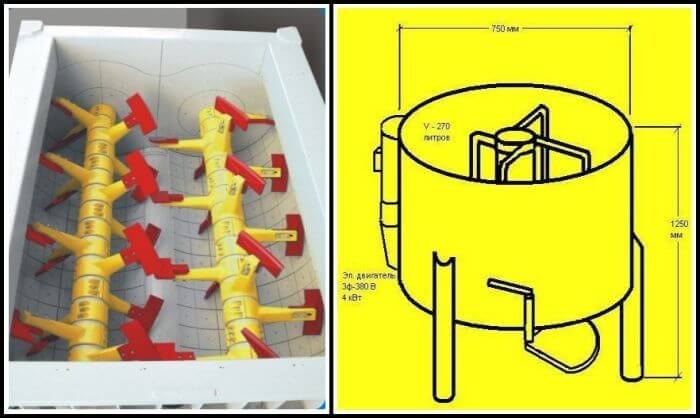
Hogyan kell otthon csinálni valamit, ami nem nehéz? Igen, és hasznos? A házat tisztán kell tartani, és kívánatos automatizálni ezt a folyamatot. Természetesen nehéz teljes körű tisztító robotot létrehozni, de a minimális kialakítás, amely biztosítja a porok összegyűjtését a szobák emeletéről, meglehetősen alkalmas. Őszintén szólva azt fogjuk tekinteni, hogy egy helyen működik, és ezzel egyidejűleg eltávolítja a diszlokációs zónában található kis törmeléket. Ilyen struktúra létrehozásához a következő anyagok szükségesek:
- Műanyag lemez.
- Három kis kefe, amelyeket a cipő vagy a padló tisztítására használnak.
- Két rajongó, amit az elavult számítógépeikből lehet venni.
- 9V-os akkumulátor és csatlakozó.
- Csatlakozó vagy bilincsek, amelyek a helyükre kattanhatnak.
- Csavarok és anyák.
Fúrja meg az ecsetek lyukait azonos távolságban. Csatolja őket. Kívánatos, hogy minden kefe azonos távolságban legyen a többiektől és a lemez közepétől. Csavarokkal és anyákkal mindegyikhez rögzítő rögzítőt kell rögzíteni, és maguk is segítséget nyújtanak. A beállítási csúszkákat középső helyzetbe kell állítani. A mozgás rajongókat fog használni. Csatlakoztatjuk őket az akkumulátorhoz, és párhuzamosan helyezzük el, hogy biztosítsák a robot körforgását. Ezt a konstrukciót vibrációs motorként fogják használni. Dobja meg a terminálokat és a design használatra kész. Ha a tisztítás során a robot oldalra megy, akkor állítsa be a rögzítőelemeket. A cikkben bemutatott tervezés nem igényel jelentős pénzügyi kiadásokat vagy a készségek és tapasztalatok rendelkezésre állását. A robot létrehozásakor olyan olcsó anyagokat használtak, amelyek nem állnak rendelkezésre jelentős probléma eléréséhez. Ha megnehezítené a tervezést, és célszerűen mozogna, akkor további motorok és mikrokontrollerek formájában kell javulnia. Itt van egy robot otthon készítése. És csak gondolj, hogy mennyit tudsz javítani itt! A tervezési tevékenységek legszélesebb területe.
Kevés ember emlékszik, sajnos, hogy 2005-ben voltak kémiai testvérek, és csodálatos klipük volt. - Higgye, ahol egy robotkar üldözi a videót a hős körül.
Aztán álmom volt. Abban az időben nem kielégítő, mivel nem volt a legkisebb ötletem az elektronikáról. De el akartam hinni - hiszek. Tíz év telt el, és csak tegnap sikerült először összeállítanom a saját robot manipulátoromat, elindítottam a munkába, majd megszakítottam, javítottam és újra elkezdtem a munkát, és a folyamat során ismerősöket találni és önbizalmat szerezni.
Figyelem, a vágott spoiler alatt!
Minden kezdődött (Hello Keith úr, és köszönjük, hogy megadta nekünk a blogodat!), Ami majdnem azonnal megtalálható és kiválasztásra került a Habré-ről szóló cikk után. A webhely azt mondja, hogy még egy 8 éves gyermek is összeállíthat egy robotot - miért rosszabb? Ugyanúgy próbálom meg a kezemet.
Először paranoia volt
Valódi paranoiásként azonnal kifejezem azokat a aggályokat, amelyeket kezdetben a tervezővel kapcsolatban tettem. Gyermekkoromban először jó szovjet tervezők voltak, majd a kínai játékok szétszóródtak a kezükben ... és aztán gyermekkor véget ért: (Ezért, ami a játékok emlékezetében marad, az volt:
- Vajon a műanyag megszakad-e és összezúzódik a kezedben?
- A részletek nem illeszkednek egymáshoz?
- A készlet nem minden részlet?
- Az összeszerelt szerkezet törékeny és rövid élettartamú lesz?
- Néhány résznek le kell fejeznie a fájlt
- És az alkatrészek egy része csak nem lesz a készletben.
- Egy másik rész kezdetben nem fog működni, meg kell változtatni
A tervező adatai nemcsak tökéletesen illeszkednek egymáshoz, hanem arra is gondolták, hogy a részleteket szinte lehetetlen összekeverni. Igaz, a német alapossággal az alkotók pontosan annyira, mint amennyire szüksége vanezért nem kívánatos, hogy elveszítsük a fogaskerekeket a padló mentén, vagy megzavarjuk a „melyik utat” a robot összeállításakor.
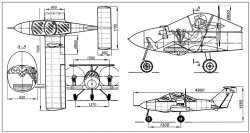
Műszaki adatok:
hossza:228 mm
magasság: 380 mm
szélesség: 160 mm
Összeszerelési súly: 658 gr.
Tápegység: 4 D típusú elem
A felemelt elemek súlya: legfeljebb 100 gramm
háttérvilágítás: 1 LED
Vezérlő típusa: vezetékes távirányító
Becsült építési idő: 6 óra
mozgás: 5 kollektormotor
Strukturális védelem vezetés közben: racsnis
mobilitás:
Rögzítési mechanizmus: 0-1,77""
Csuklómozgás: 120 fokon belül
Könyökmozgás: 300 fokon belül
Vállmozgás: 180 fokon belül
Forgatás a platformon: 270 fokon belül
Szükséged lesz:
- hosszúkás fogók (nem tudsz nélkülözni)
- oldalsó vágók (cserélhető papír késsel, ollóval)
- phillips csavarhúzó
- 4 D típusú elem
Fontos! A finom részletekről
Beszélgetés "fogaskerekekről". Ha hasonló problémával szembesül, és tudja, hogyan lehet még kényelmesebbé tenni az összeszerelést - üdvözöljük a megjegyzéseket. Eddig megosztom tapasztalataimat.Egyenlő működésű, de a különböző hosszúságú csavarok és csavarok meglehetősen jól jelennek meg az utasításokban, például az alábbi középső képen P11 és P13 csavarokat látunk. Vagy talán P14 - jól, itt van újra, újra összekeverem őket. =)
Meg lehet különböztetni őket: az utasításban meg van írva, hogy melyik milliméter. Először is, nem ülsz egy féknyereggel (különösen, ha 8 éves vagy, és egyszerűen nem), és másodszor, csak akkor tudod megkülönböztetni őket, ha összeállítod őket, ami nem azonnal jön eszembe jutott (nem jöttem, hehe).
Ezért előzetesen figyelmeztetni fogom, ha úgy dönt, hogy maga vagy egy hasonló robot összeáll, itt egy tipp:
- vagy előre nézze meg a rögzítőket;
- vagy vásároljon magának több kis csavart, csavart és csavart, hogy ne fürödjön.
Mindenesetre ne dobjon semmit, amíg nem fejezi be az összeszerelést. A középső alsó képen, a robot „fejének” testrészének két része között - egy kis gyűrű, amely majdnem más darabokkal repült a szemétbe. Ez egyébként a LED-es villanófény tartója a fogantyúmechanizmus „fejében”.
Szerelési folyamat
Az utasítások a robothoz csatolva nincsenek további képek és egyértelműen katalogizált és címkézett részletek.A részek elég kényelmesek ahhoz, hogy megharapjanak, és nem igényelnek eltávolítást, de tetszett az ötlet, hogy minden részletet egy karton késsel és ollóval dolgozzam fel, bár ez nem szükséges.
A szerelvény az öt motor közül négyből indul ki, ami igazi öröm, hogy összegyűjti: csak szerelem a sebességváltó mechanizmusait.

A motorokat szépen becsomagoltuk és egymásba ragadtuk - készen állunk arra, hogy válaszoljanak a gyermek kérdésére, hogy miért mágnesezettek a kollektormotorok (azonnal megteheti a megjegyzéseket! :)
Fontos: Az 5 motorházból 3 kell megfullad az oldalán lévő dió - a jövőben a kezeket összeszerelve a testet ültetjük. Az oldalsó anyákat nem kell csak a kis motorban használni, ami a platform alapjául szolgál, de annak érdekében, hogy ne emlékezzünk arra, hogy melyik eset jobb, egyszerre mind a négy sárga esetben megfullad az anyákat. Csak ehhez a művelethez fogó fogókra lesz szükség, a jövőben nem lesz szükség.

Körülbelül 30-40 perc után a 4 motor mindegyikét felszerelte a sebességváltó mechanizmusa és a teste. Minden nem lesz bonyolultabb, mint a gyermekkorban, a „Kinder Surprise” csak sokkal érdekesebb volt. Kérdés a fenti fotó figyelmességére: A négy kimeneti fogaskerék közül három fekete, és hol van fehér? Kék és fekete huzalnak kell kijönnie a testéből. Az utasítások mindent tartalmaznak, de azt hiszem, érdemes újra ráirányítani a figyelmet.

Miután az összes motort a kezedben tartotta, a „fej” kivételével, akkor folytatja a platform felállítását, amelyen robotunk áll. Ebben a szakaszban megértettem, hogy a csavarokkal és csavarokkal jobban kellett cselekednöm: ahogy a fenti képen látható, nem volt elég két csavarja a motoroknak az oldalsó anyákkal való rögzítésére. a már összeállított platform mélysége. Improvizálni kellett.

Amikor a platform és a kéz nagy része összeszerelésre kerül, az utasítások a fogószerkezet összegyűjtésére szolgálnak, ahol tele van kis alkatrészek és mozgó alkatrészek - a legérdekesebb!

De azt kell mondanom, hogy ez a spoiler véget ér, és a videó elindul, mert a barátnőmmel és a robotmal találkoztam, amit nem tudtam befejezni, és velem kellett vennem.
Hogyan válhat a cég lelkévé egy robot segítségével
Egyszerű! Amikor együtt építettünk együtt, világossá vált: a robotot össze kell állítani - nagyon szép. A tervezési munka együttesen kellemes. Ezért biztonságosan ajánlom ezt a szettet azoknak, akik nem akarnak egy kávézóban ülni unalmas beszélgetésekre, de barátokat szeretnének látni, és jó időt töltenek. Ráadásul úgy tűnik számomra, hogy a csapatépítés egy ilyen csoporttal - például két csapat megépítése, a sebesség érdekében - szinte egy win-win lehetőség.A robot a kezünkben életre kelt, amint befejeztük az összeszerelést. Ha örömünkre szolgál, sajnos nem tudok szavakkal beszélni, de szerintem sokan meg fognak érteni engem. Amikor az Ön által összeállított építmény hirtelen teljes életet él - ez izgalom!
Rájöttünk, hogy rettenetesen éhesek vagyunk, és enni mentünk. Nem volt messzire menni, így a robotot a kezünkben tartottuk. És itt egy kellemes meglepetés várt: a robotika nemcsak lenyűgöző. Ő is összeáll. Amint leültünk egy asztalra, körülvettünk olyan embereket, akik meg akarták ismerni a robotot, és magukért gyűjtötték össze. Leginkább a srácok szívesen üdvözölték a robotot „a csápokért”, mert úgy viselkedik, mint egy élő ember, és mindenekelőtt ugyanaz a kéz! Egy szóval az animatronics alapelveit a felhasználók intuitív módon elsajátították.. Így nézett ki:
hibaelhárítás
Hazatérve egy kellemetlen meglepetésért voltam, és jó, hogy ez a felülvizsgálat közzététele előtt történt, mert most azonnal megvitatjuk a hibaelhárítást.Úgy döntött, hogy megpróbáljuk áthelyezni a kezét a maximális amplitúdóba, sikerült elérni egy jellegzetes repedést és a motoros mechanizmus funkcionalitásának hibáját a könyökben. Először megzavarta: most már egy új játék, amit éppen összeállítottak - és már nem működik.
De aztán rám meredt: ha magadat gyűjtötted, miért lett ez? =) Nagyon jól ismerem a házon belüli fogaskerekek halmazát, és annak megértéséhez, hogy maga a motor megszakadt, vagy ha az ügyet egyszerűen nem rögzítették, a rakományt ki lehet venni a táblából, és megnézni, hogy folytatódnak-e a kattintások.
Itt voltam, hogy éreztem magam ezennel robot mester!

A „könyökcsukló” gondos szétszerelése után meg lehetett állapítani, hogy a motor terhelés nélkül simán fut. Az ügy kiment, az egyik csavar belsejébe esett (mert motorja mágnesezett), és ha folytatjuk a működést, akkor a fogaskerekek megsérülnének - a törölt műanyag jellegzetes „porja” szétszerelték őket.
Nagyon kényelmes, hogy a robotnak nem kellett teljesen szétszerelni. És tényleg jó, hogy a bontás a nem eléggé ügyes összeszerelésnek köszönhető, nem pedig néhány gyári nehézség miatt: nem találtak egyáltalán a készletemben.
Tanács: Az összeszerelés után először tartsa a csavarhúzót és a fogó kezét - hasznos lehet.
Mit lehet emelni a készleten?
Önbizalom!Nemcsak közös témáim voltak a teljes idegenekkel való kommunikációra, de sikerült nem csak önállóan összeállítanom, hanem megjavítani a játékot is! Szóval biztos vagyok benne, hogy a robotommal minden mindig rendben lesz. És ez egy nagyon kellemes érzés, amikor a kedvenc dolgokról van szó.
Olyan világban élünk, ahol rettenetesen függünk a beszállítóktól, a beszállítóktól, a szervizszemélyzetektől és a szabad idő és pénz elérhetőségétől. Ha alig tudod, hogyan kell csinálni semmit, meg kell fizetned mindent, és valószínűleg túlfizetned kell. Megfizethetetlen az a képesség, hogy a játékot saját maga tudja rögzíteni, mert tudod, hogy minden csomó elrendezve van. Hagyja, hogy a gyermek ilyen magabiztos legyen.
találatok
Amit tetszett:- Az utasítások szerint összeállított robot nem igényelt hibakeresést, azonnal elkezdődött
- A részleteket szinte lehetetlen összekeverni
- Szigorú katalógus és elérhetőség
- Nem olvasható utasítások (csak képek)
- A struktúrákban nincs jelentős hátrány és hiányosságok
- Könnyű összeszerelés
- Könnyű megelőzés és javítás
- Végül, de nem utolsósorban: magadat gyűjted a játékodat, a filippínó gyerekek nem dolgoznak az Ön számára
- Több rögzítőelem, prozapas
- Alkatrészek és pótalkatrészek, hogy szükség esetén cserélhessék
- Több robot, más és összetett
- Az ötletek, amelyek javíthatók, - a szó egy szóval nem ér véget egy összeszerelésen! Tényleg azt akarom, hogy folytassa!
A robot megszerzése ebből a kivitelezőből nem bonyolultabb, mint egy puzzle vagy „Kinder meglepetés”, csak az eredmény sokkal nagyobb, és érzelmek viharát okozza közöttünk és körülöttünk. Nagy készlet, köszönöm
Kapcsolódó cikkek